
最近のレーザーカッター、3Dプリンターなどのタイミングベルトのテンションをかけるためのスプリングです。@50でおわけします。
テンションスプリング入荷しました
1

最近のレーザーカッター、3Dプリンターなどのタイミングベルトのテンションをかけるためのスプリングです。@50でおわけします。
3D Printer Robo3D の故障

第一発見症状
X resetで止まらない retryの末に最終的に止まった?
確認項目 12/12
2) MOTORドライバー基板のX軸の調整値をいじりながら反応をみる–> X軸の動作はスムーズに動かない。
3) RAMPSボードの目視確認–>NG Regulatorでコネクター接触部において一部溶融して接点ネジ困難
==>予備のRAMPSボードに交換、MOTORドライバーは付け替えで現状品を換装
MatterControl(制御ソフト)から確認
3) ATMEGAを切り分けで、交換したところ、シリアルポートがUbuntu(Linux1)側からttyACMxとして見えないという状態
–> Firmwareの書き換えが必要と認識して書き込み環境からNV, イメージを同一にすべく行ったが解決せず。
4) 同一品として認識していたATMEGA2560がチャイナ仕様でUSBがCH340だったことが判明。オリジナル版は、ATMEGA16UがUSB処理として搭載されていて、これはttyACMxとしてLinux側ではハンドリングされていた。–> CH340対応のカーネルドライバーモジュールを探索して、これをbuildしてinsmodして検知できたが、そのデバイス名は/dev/ttyUSBxとなった。Windowsと違ってデバイスのクラスがそこに見えてしまうのでアプリ設定が変更になる。
12/13 対応
1) 温度センサーがエクストルーダー側が計測できない。差し替えでRAMPSポートはOKなので、センサーサイドの抵抗を確認すると途中に作成した延長ケーブルで接触不良(断線っぽい)
–> 延長ケーブルの修理(圧着不良なのでそのラインのみ雌雄の端子を圧着した別の線を作成してハウジングに挿入した)でセンサー系統は解決、以前発生していた温度計測が0とフリッカー表示していたのは、これが原因だったらしい。
head温度のループ制御が崩れると制御不能に陥るので、これは肝心
2)次に各モーター制御を確認するのだが、モータードライバの調整について要調査だ。
年が明けての報告 1/5
突然モーター制御が一切動作しなくなった。切り分けとしてはMatterControlのメニューからのヒータープリセットと、その温度設定に伴う温度センス報告は正しく期待通りに動くのだが、モーター制御でX,Y,Zの各軸の移動指示が動作しない。RAMPSシールドやATMEGAの組み合わせや搭載すべきFirmwareのイメージ書き換えなどでも解決しない。
構成しているハードウェア結線側の確認を逐一行なったが不確実なQIコネクター箇所などの発見程度で現在の問題解決にはつながらず、将来の問題予防にはなったが・・・。
ハードウェアの組み合わせ変更を行い試験を続けたが、進展を見ないまま新年を迎えた。MatterControl以外の環境は現在は搭載していないので旧環境ReptierHostを搭載しなおしてみるかと思っていた。MatterControlの画面に残っている印刷Queueが気になり、何気に消していった。消し切ったところで、ヘッドの位置制御のコマンドが動作しはじめた。
使っていた印刷クライアントソフトの問題だった。このMatterControlは、印刷Queueが残っている限りは、印刷に関係するヘッドの位置制御などが出来ないということに思いが至った。
新しい、カードにしてしまっていたので各軸の制御を確認していき、Z軸の駆動能力が足らずにいることが判明したのでドライバー基板のポテンショメーターを時計回しにして増やしていき解決に近づくのを見つけかかった時に、煙が上がった。ドライバー基板が能力を超えたようだ。Z軸は二つのモーターを駆動する設計なので無理があるようだ。使っていない第二Extruder用のドライバー基板と差し替えて調整をして動作に至った。
クライアントソフトのスレッドで確認手順について問い合わせを早めにしておけば、よかったと悔やまれる。
3Dプリンターで昨夜、出力をしていたら朝になって途中でおかしくなっていた。
確認したところコマンドが正しく通らなくなっていた、コントロール側からみるとX軸のリセットをするとセンスが正しく動いていないようだった。切り分けを進めるとセンススイッチに問題はなく、どうもシステムとしてFirmwareが正しく動作してないようだった。いったんリセットスタートをCliantのUbuntuも3Dプリンターともに行うと、ATMEGAの本来動作すべきUSB動作が正しく立ち上がらない状況が起きていた。「/dev/ttyACM0」がUbuntuからは見えていないという状況だった。
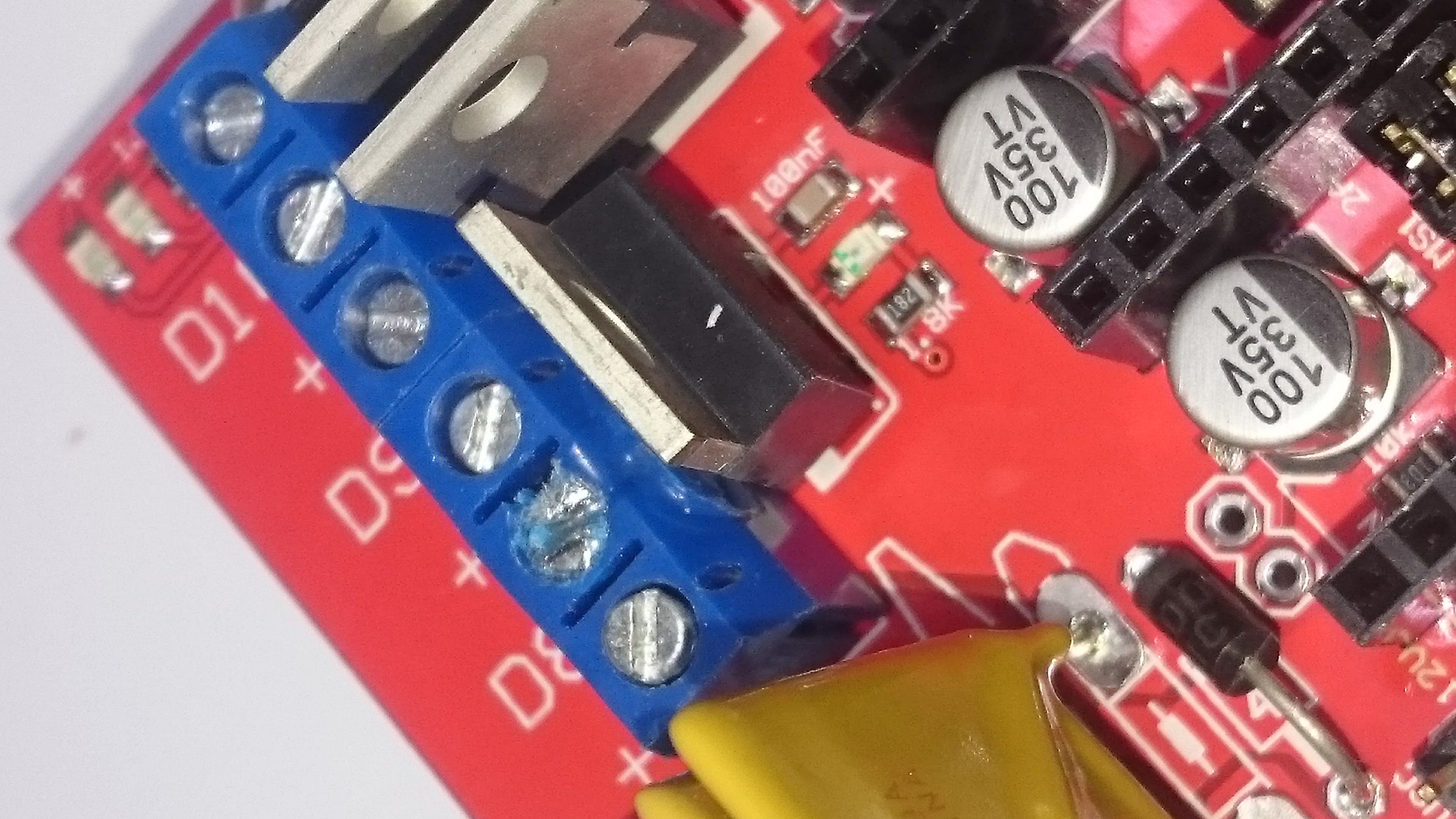
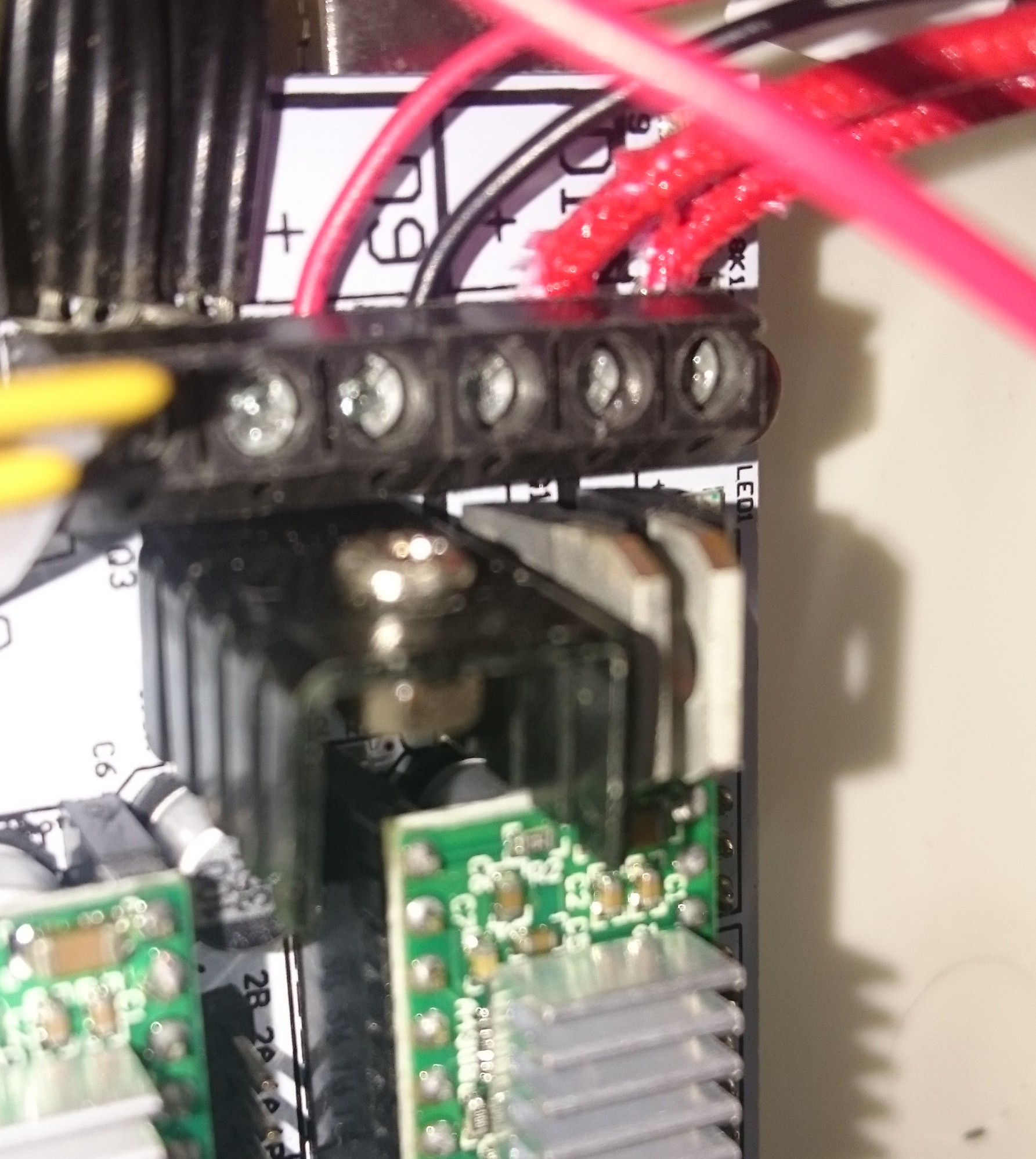
溶けたPoroluシールド
RampsシールドとATMEGAを取り外してみて、ATMEGA単体では動作しているようで/deb/ttyACM0が見えているのだが、シールド込みではおかしくなるようだった。シールドを交換してみようとすると、取りついているターミナルの一つがうまくネジが回らない状況だった。よくみると、ターミナルに当たっていたレギュレータでターミナルのハウジングが溶けていた。
交換した予備のシールドの当該箇所を見てみると、放熱器をつけているではないか。レギュレータが壊れたのかどうかの確認は、後にして、まずは交換した。動作していたモータードライバのモジュールはすべて換装しなおした。
Lead Screwの更新でZ軸の安定化とAuto Level機構が合わせてつけられるようになった。調整をしているのか、整備をしているのか、バグ取りをしているのか不明なのだが時間がかかった。まあ、二年ほど使ってきた3Dプリンターで今更ながらに原理機構について学ぶことがある。
Robo3Dは、RepRapというOpenSource/OpenHardの3Dプリンタープロジェクトの一つである。ABSとPLAの双方に対応していて、大きなサイズの印刷物が作れて安いということで登場した米国ベンチャー(KickStarterで立ち上げ)の製品だ。ABS樹脂のほうが強度がありそうだということで、このフィラメントをまとめ買いしたのだが安定に印刷するという目的で完成品を購入したつもりだったが、ABSは作成途上の温度管理が難しくオープンエアーな構造の機械では難しいらしく、おもにPLAを使ってきた。
3Dプリンターの調整で、めんどくさいのはヘッドを清掃交換したりした際に生じるZ軸のゼロ点調整である。紙や隙間ゲージを使って0.12ミリくらいのギャップに調整するわけである。その後のプリンターでは自動調整機構が搭載されてきたので、この機械にも入れることにしたというわけだ。
Auto Levelの肝は、従来の調整したポジションからどれだけヘッドを下げたら、当該センサーがシグナルを出すかということであり、その値を測定してプリンターの個体値としGコードで与えることだ。そのコマンドはM565で、今回は従来通りに隙間ゲージで最適となるギャップを設定しておき、そこから3Dプリンター制御ソフトでZ軸を0.1ミリ単位で下げていくということで割り出した。制御している側から見れば、信号がきた時点が、どれだけ先に行ってしまっているのかということになる。
最後の調整は、第一レイヤの引き回し具合で確認することになる。正しく押し付けて伸びた樹脂として引き回しが出来ていれば完了です。のしが足らない場合には、にょろにょろとした引き回しになってしまいます。その状態ではプリントが外れてしまいます。
設定データを、保存してしまえばマイクロスイッチの取り付けさえしっかりしていれば、あとは、プレートに様々なシートや糊を貼ってもチューニングされた出力が始まります。
調整中に気づいた改善修正項目メモ
1) 出力ヘッドの取り付けボルトの二組のうち、一つがなくなっていた。
これで印刷がぶれていた可能性がありました。–>修正済
2) 背面にある電源スイッチとインレットがおれていました。–>同様なものを手配しました。立てかける時には、必ず電源ケーブルを抜きましょう。
3) 何度かMatterControlの画面で温度表示が0と表示値を繰り返す現象がおきた。–>要調査
Arduino Megaのリセットを行い復旧はした。
4) Z軸のモーターを変えたことでmotorドライバーの出力が不足して振動するのみとなった。–> 当該のモータードライバー基板のポテンショを右回しして出力を増やすことで動作した。モーターでばらつきがあるというよりも、プリンター側のメカが変わったので必要なトルクが増えたということだろう。
5) AutoLevelのセンサはマイクロスイッチなのだが取り付けのM2のネジが効いていない気がする箇所がある。ロック処置が必要。
6) 5)がおかしくなった場合には、フィラメント出力が止まってしまう可能性があるが、位置が下にずれてフィラメントが出なくなった場合には、エクストルーダーのドライブギアの切り込みでフィラメントが削れてしまっているのでフィラメント送りが進まなくなっている。ヘッドの温度を加熱設定してフィラメントを手操作で押しだすことで解消する。
里に設置している3DプリンターはKickStarterでスタートしたモデルで現在は進化したものが製品化されていますので、出来るだけ製品に近い性能が出るようにupgradeを続けています。
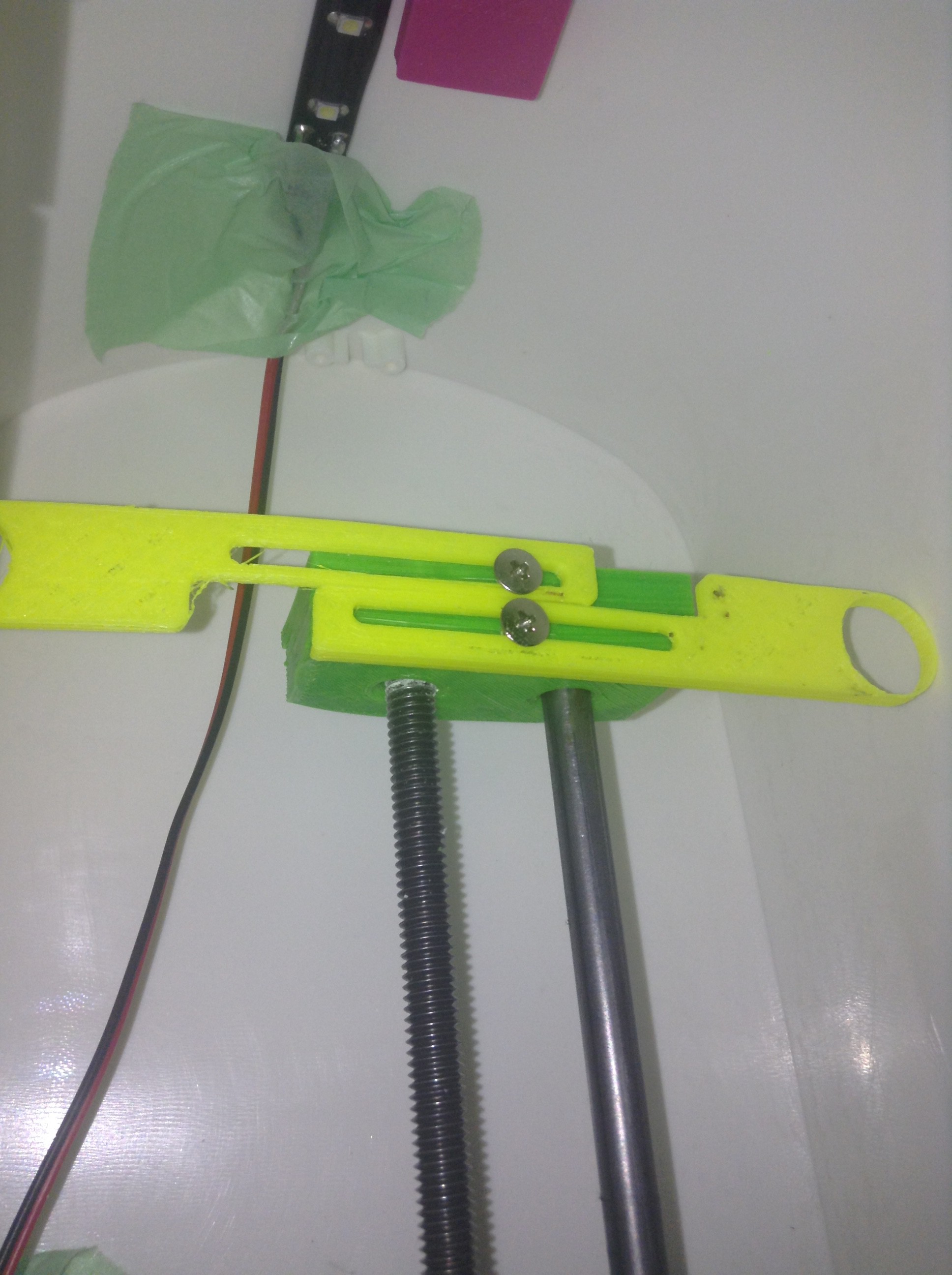
以下の写真にあるようにプリントヘッドを支えているX軸(左右)のレールがZ軸のロッドで上下します。今回の変更で下側にマイクロスイッチが付けられています。Z軸(上下)のゼロ点設定が、ヒートベッド上のマルチポイントで測定されてテーブルやレールのひずみを補正するという動作になるそうです。
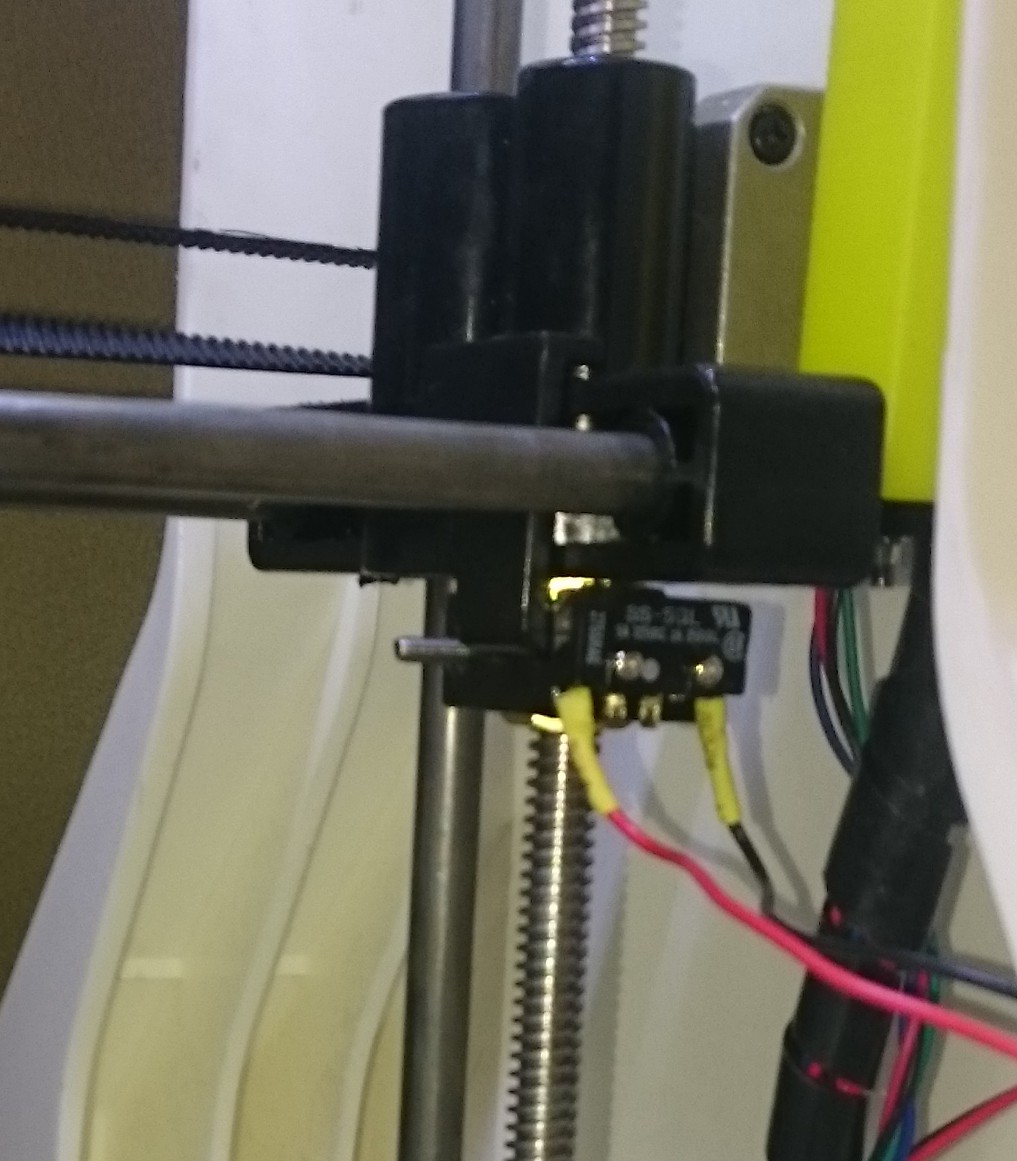
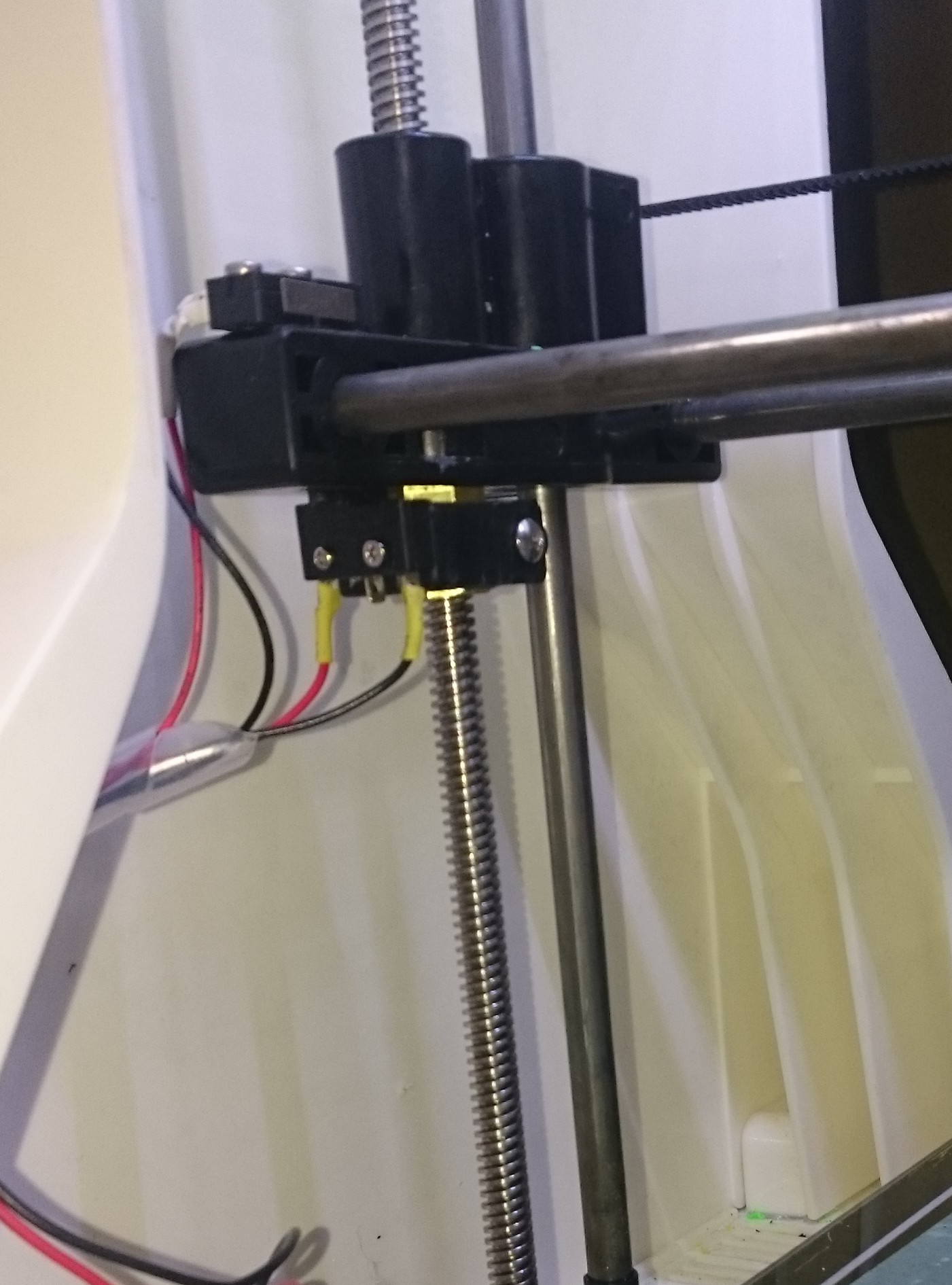
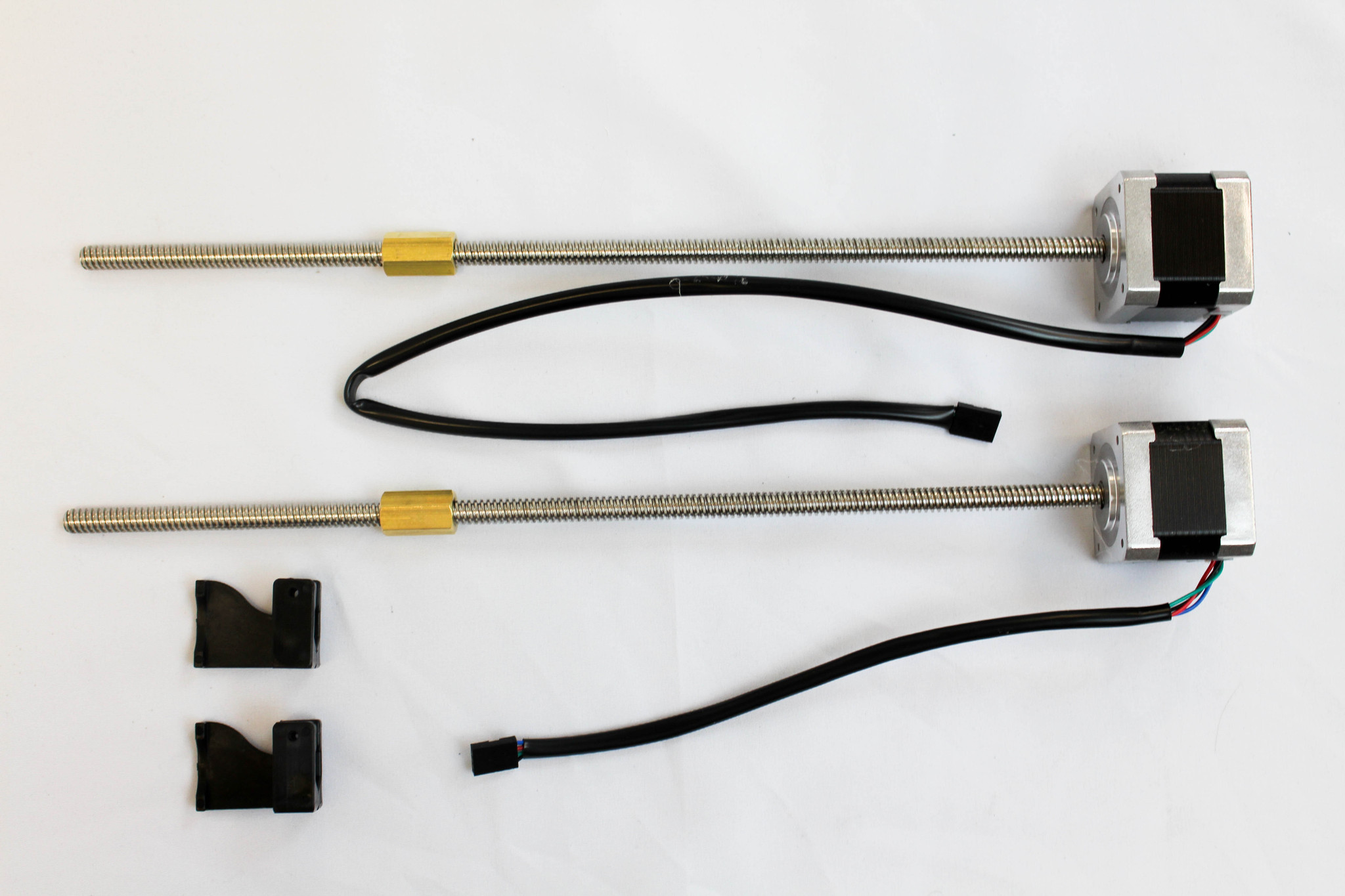
今回の修正では、Z軸のロッドが以下の写真のようなモーター一体型になりました。
また、カップリングナットがステージとセンサーの双方を上下に昇降させることになります。ヘッドがベッドに当たるとセンサーのみが下降することになりスイッチが入ることになります。

3Dプリンターの制御機構はATMEGA2560のArduinoが搭載されていて、これにReprap仕様のプリンター制御シールドが乗っています。Z軸のEndstp接点入力にこれら二つのセンサーがパラ付けで接続されます。どちらかの接点がメークすることで検知します。実際にステージの自重などでひずみも生じ左右での差異がでますので、この機構は正しいと思います。
3Dプリンターの制御はWin7ノートPCで実践してきましたが、Windows10への移行もありさらにUbuntuとの切り替えも含めて今日はUbuntu環境にもArduino開発環境とプリンタ制御ソフト(MatterControl)の双方をインストールしました。
3Dプリンターとの通信制御には250kbpsという速度設定が、当初は壁になっていましたが、この二年余りのLinux環境の進化で問題なく普通にインストールで動作するようになりました。次週には動作報告が出来るかと思います。
おまちください。
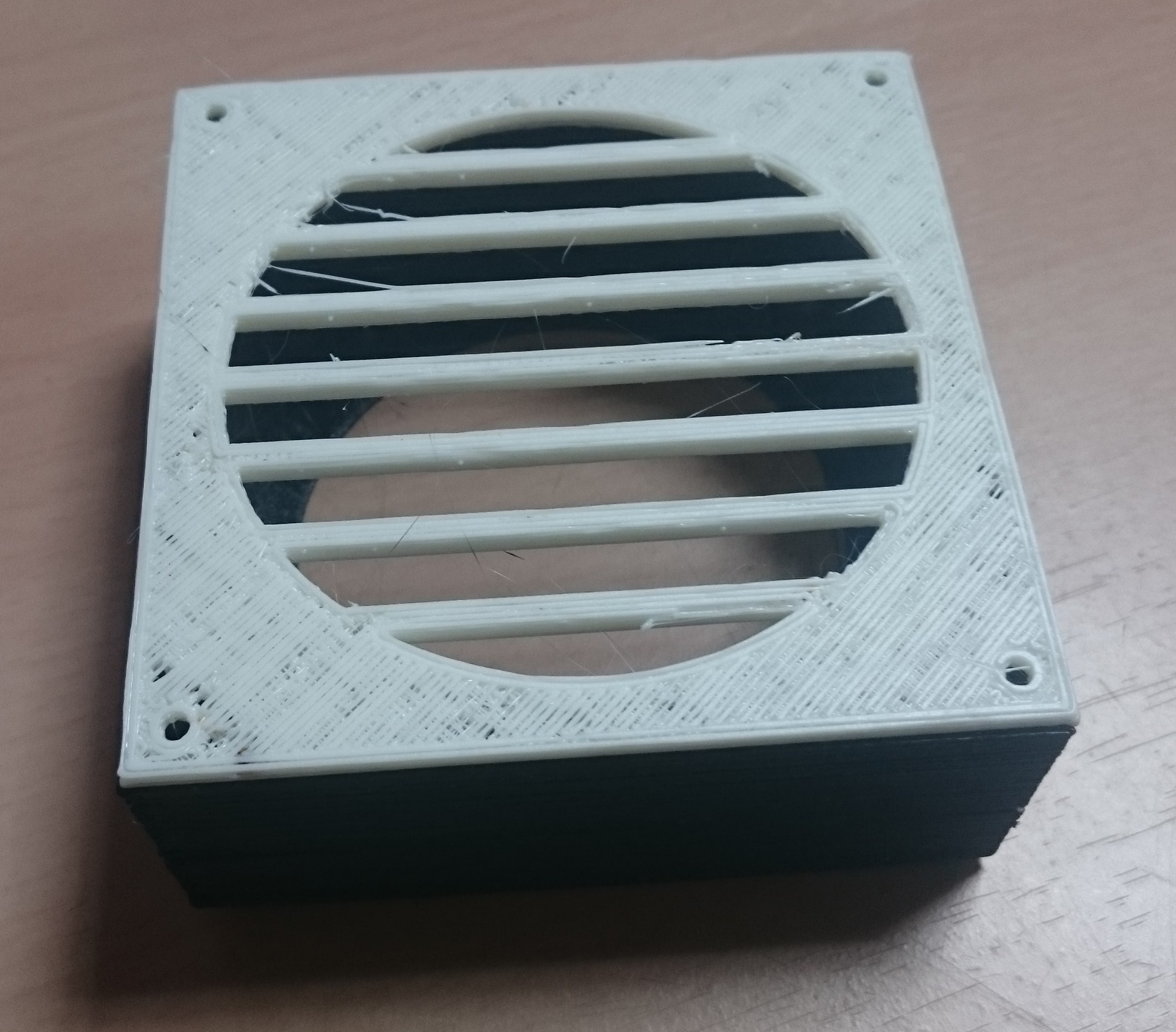
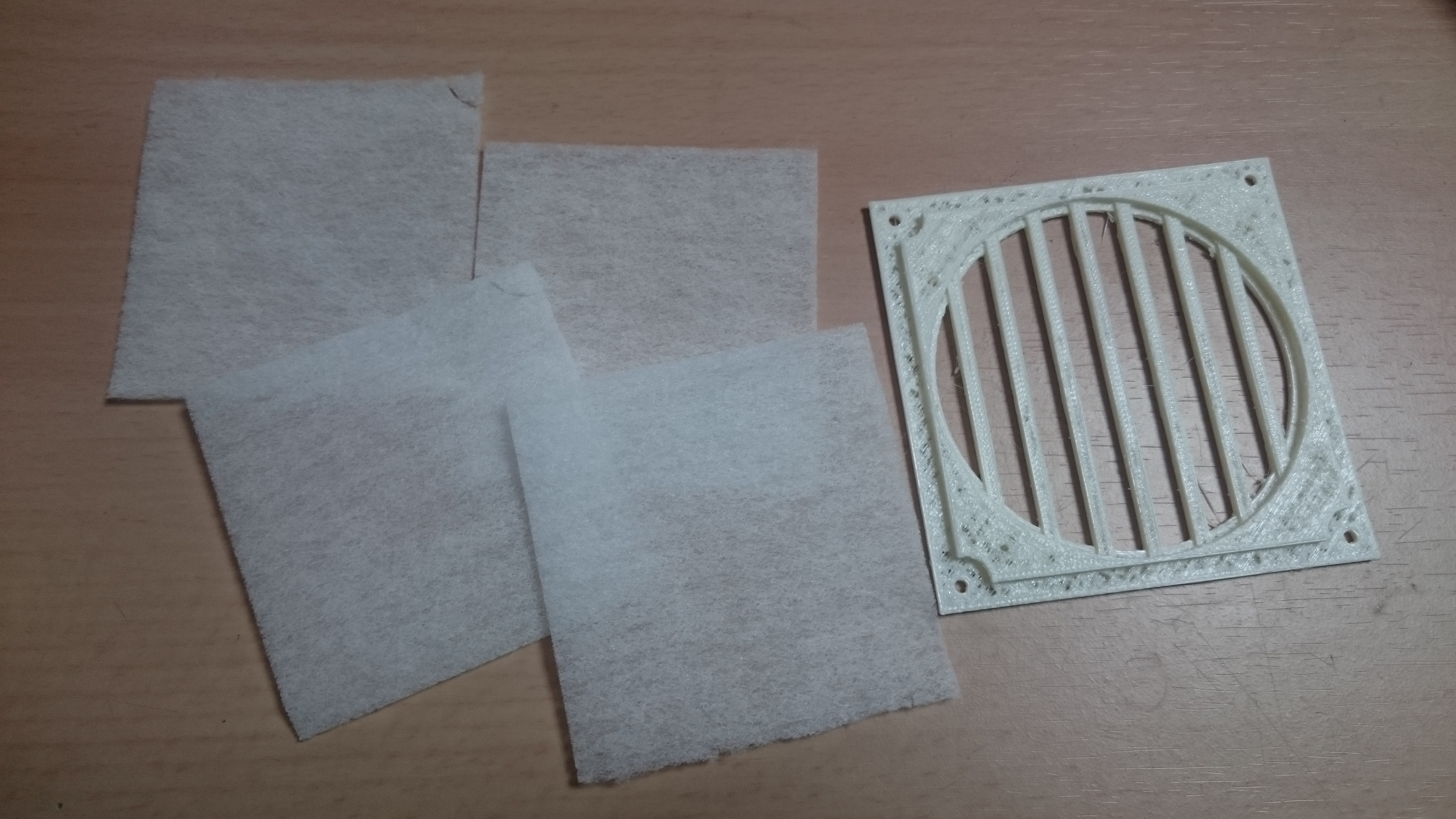
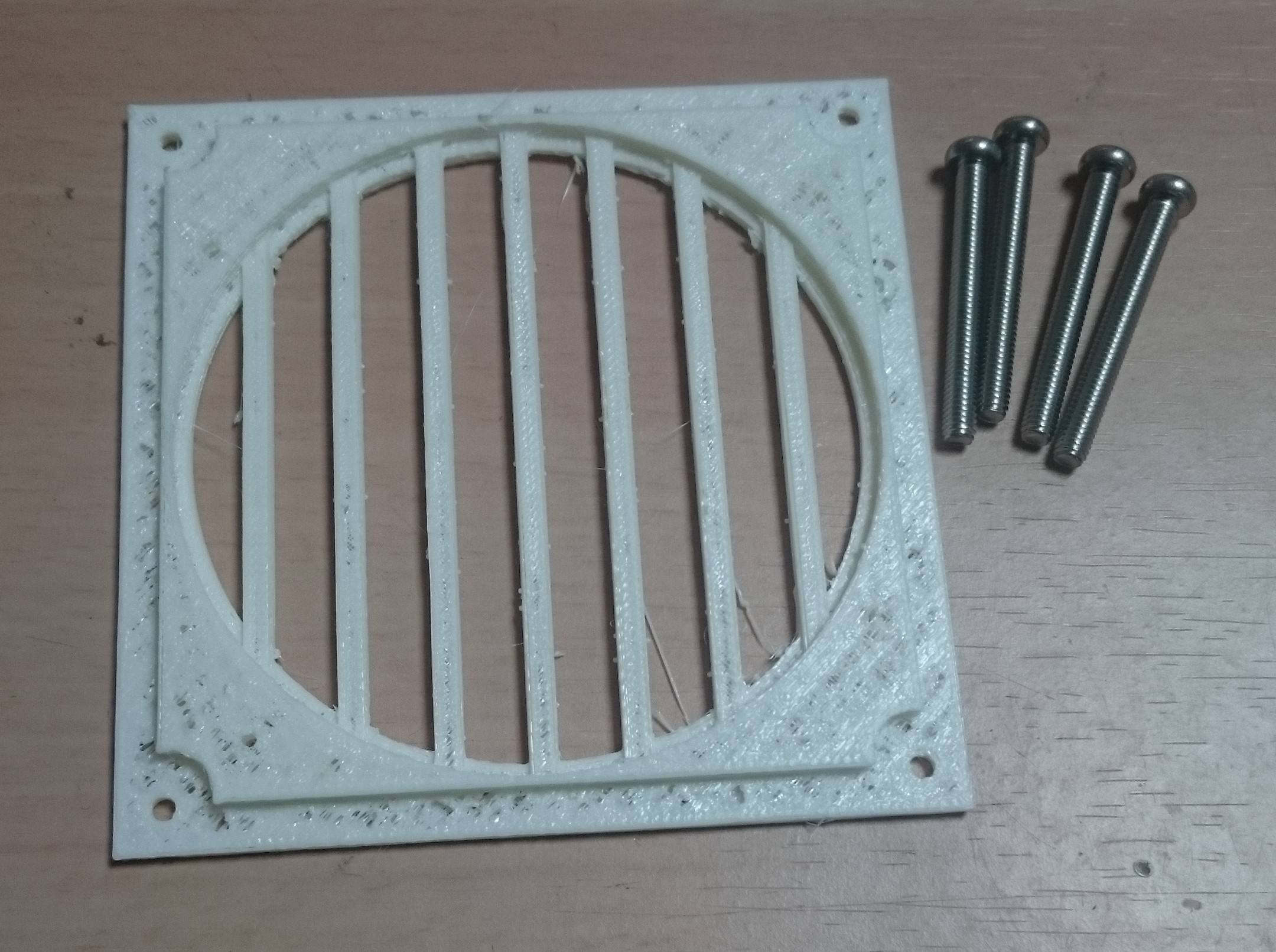
組み込みの里では、パワーは小さいもののレーザーカッターがあります。メカニズムとしては焼き切るので、臭いが発生します。縁側においてやるという意見もありますが、対策はとりたいと思います。簡易脱臭機構を3Dプリンターで印刷してみます。脱臭剤の粒を収納するポケットは、まだ印刷中です。ケースとフタは出来ました。簡便に、この箱にお茶の葉の袋にいれてまずは効能を確認します。珈琲豆の残渣を


Robo3DプリンターのABS出力も含めて安定化したこともあり、工作室の作業台の上で場所をとっている電動工具シリーズをフック作成して壁にひっかける作業を進めています。
作成ソフトは123 Designで結果thingiverseに展開します。
作例1) マキタ電動丸ノコフック

作例4) ワイドフック

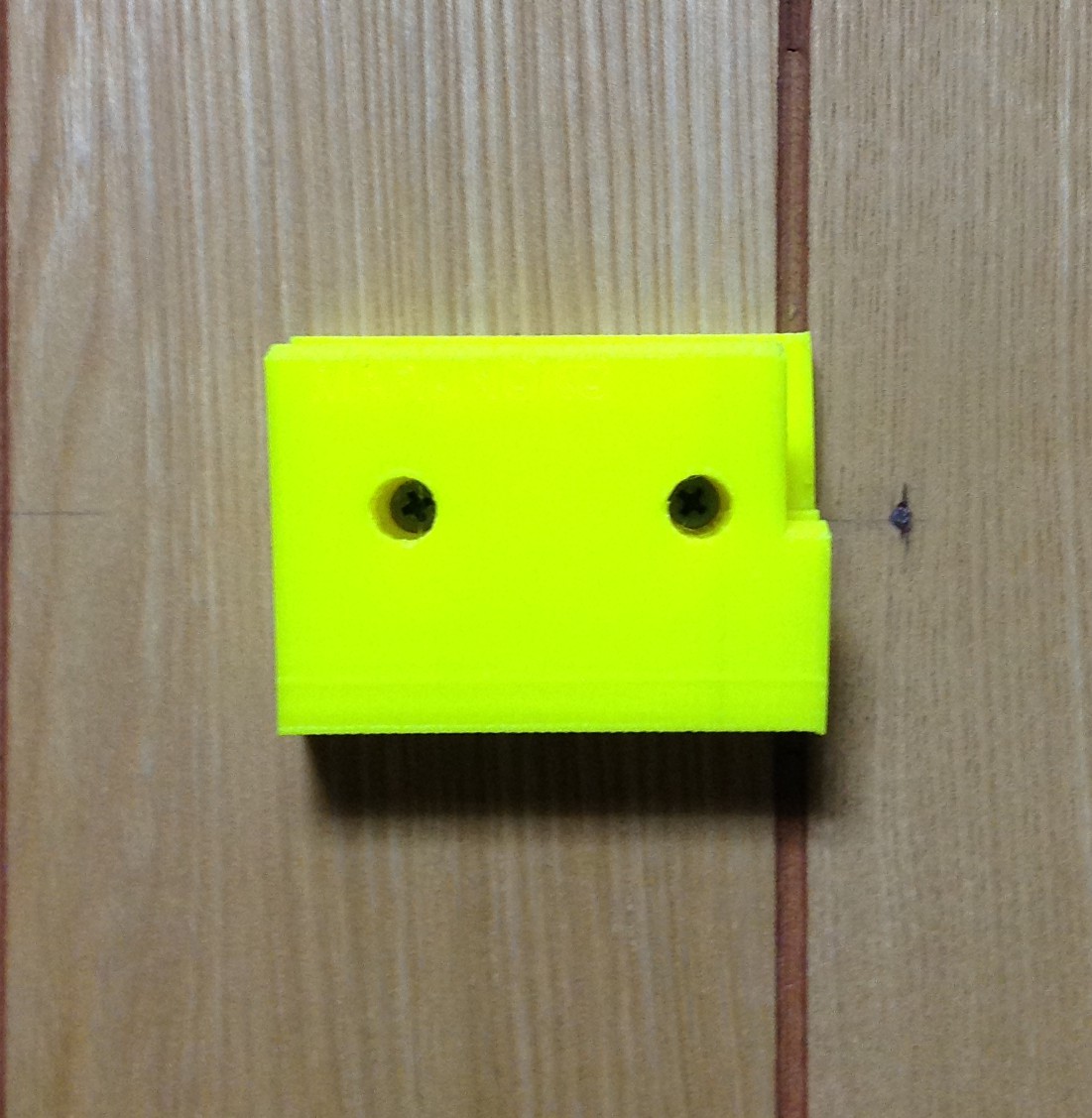
Robo3Dプリンターの初期バージョン(kickstarterモデル)は、Z軸の構造がM8のthread boltとステッピングモーターをユニバーサルカップリングで結合している為、ふらついてトップが旋回してしまいZ軸がぶれるという課題があり、安定化させる方策を取られている。
黄色のパーツがケース上部に内側から支える形となる。当初作成した時に、この部品作成にABSを用いた際にプリントが不安定だったことからPLAで作成したのだが、コイル部分の強度が不足してすべて折れるという状況になり、最新環境でABSで再度出力することでホットエンドの更新などが功を奏して丈夫なコイル部が写真のように作れた。
根本的な問題としてZ軸の構造改善としては、ステッピングモーターの軸にスレッドボルトを付けた構造のパーツがRobo3Dから案内されているので現在手配しているので、そちらに交換予定である。
この三連休に要望があり、知己の一名様だったことから、組み込みの里での合宿サポートをトライアル実施しました。定常的に出来るかどうかは未定です。(主にスペースの問題です)
現在の組み込みの里の運用状況は、拙宅の別宅(5DKの平屋)での週末稼働ですが家族が園芸活動で来ていることもありますので一部屋はパーソナルスペースとして一つ確保していますので、残りの作業スペースでの睡眠スペースを提供できます。
現在、貸し出せるマットレス、寝袋は一式のみです。
今回利用されたのは、一度訪問していただいた経験のある知人で、あるシステムのプロトタイプを作りたいという目的でいらっしゃいました。基本的に必要な材料は秋葉原やホームセンターで買い求めたうえで道具も持ち込んでという流れでしたが、工具や道具は不要だったかと思います。
提供した電子部品・工作材料は
40pinストレートのソケット
I2C接続のGPIO-IC
シリアル接続のLEDテープアクリル端材
40芯ジャンパーケーブル(QI 雄・雄/雄・雌)
超小型ブレッドボード
ホットボンド(グルーガン)
メラミンスポンジ
QIコネクターの圧着材料
提供した工具
アクリルカッター
ドリル
テーパーリーマー
圧着機
提供したサービス
実験パーツの3D出力
ネット環境(Wifi)
アイデア提供
食事環境
近くにあるコンビニで、お弁当などの食材を買い込んでいらっしゃいました。
その他
自転車で来られた方でしたので、2.3km先の銭湯を紹介したところ利用されていました。
土曜夕方から月曜朝までという限られた期間でしたが、所定目的の自宅環境で出来ない加工や試作検討までの作業を出来たということでした。当初目論見では部品不足やインタフェース不足などがあったようですが、とりあえず必要なパーツを在庫していたので、提供出来ました。
今週は、Makersの方が試作品開発に合宿で来られて対応させていただきました。
管理人が並行処理でやっていた3Dプリンター改造の中で、別系統から依頼を受けていた作品は、スタック型のペンスタンドです。手前にあるのが、オリジナルのものでしたが故あって埃汚れを落とそうとして洗ってしまった事象があり、紙由来のものだったことから情けない姿になってしまいました。スタンドパーツの支柱やベースに問題はないことから、同寸のものをプリントすることになり採寸の上、PLAで出力しています。四段積む構成なのでカラフルにという要望を受けて、各段で色をかえたフィラメントで作成中です。道半ばです。
四段出来ました。銀、黄色、マゼンタ、青です。
オリジナルの製品は、昔、無印良品で出されていた小物入れです。現在は取り扱われていないようです。
一つの単位は100mmx50mmx100mmのボックスで、厚みは2.5mmのPLAでの出力となります。







{kind=link}