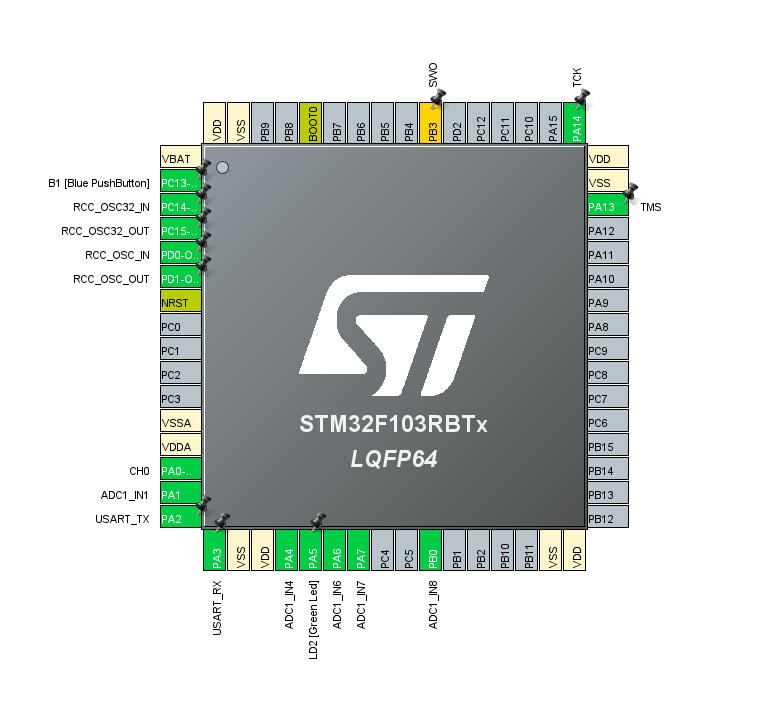
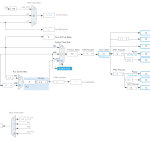
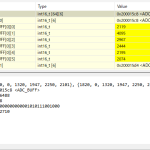
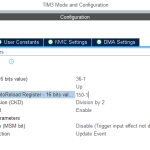
STM32F103を用いてADCを複数チャネル使い、常時計測を行い計測要求があった時点で過去10mS間の64回のデータを移動平均を取って処理報告制御するという処理を組んでいたのだが、STM32の持つDiscontinuousモードを用いて各チャネルを一回ずつ分割して順次TIM3のイベント周期で計測していくという形で計測をした。TIM3で25uS毎にイベントを出してADCが1chずつ計測していきDMAがサーキュラーバッファに格納していく。PA0にNucleoのGND/3.3Vを接続してバッファにどの様に入るのかを確認した。この使い方をすると、3.3V result on PA0 discontinuous modeの様にバッファの先頭に入るべきが2つ目に入る結果となった。
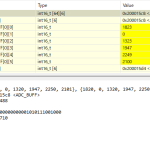
150uS周期に全てのチャネルを一気に計測するContinuous modeにして計測した結果は、3.3V result on PA0 continuous modeのようにバッファ先頭に入る形となった。期待値は、こちらなのでこのモードを用いる形にした。なぜズレるのかは不明だ。
今回は、デバッグ時点で応答しないという現象が多発して「Target not responding」というようなメッセージが出ていたのだが、評価基板の回路図と照らして間違ったIOの設定をしたりして端子同志がショートしたりといった事象が起きてしまったからのようだった。ともあれ。必要十分な低めのクロックを与えて消費電流を抑えることは必要だろう。コマンドとアイドルループ処理で凡そ0.6mS程度でソフトは回っているようだ。表示LEDにフリックを入れてオシロで確認できた。ADC以外にもシリアルコマンドの受信はDMAに任せていてコマンド処理ループ側で取り込みバッファからの読み出しで実行している。