
BT接続の沼にはまった。HC-05/HC-06ともに在庫が山の中から見つかり確認をするのだが、オリジナル品とコピー品の混在なのかも含めて曖昧で見えてきたことがあった。
PINコードの設定コマンドがエラーになり、PINコードの確認ではPINコードが6桁の表示になるのだった。
PINコード桁数については、さまざまなBT機器の中で4桁設定が占めていたのと以前の開発記録では4桁だったので混乱した。調べていくとBT規格の進展の中で6桁に代わっていったようでHC-05/HC-06の目指すIoT機器ではBLE規格などの時代になり6桁に移ったらしい。もっていたスマホアプリではPIN4桁設定だったのだが、新しい他のBT接続ターミナルアプリを調べると6桁に対応しているようで、スマホとの接続でも問題なく動作することが分かった。週末にS君が来た時にはBT子機となるHC-06タイプのモジュールを渡して彼のBT接続ターミナルソフトでも6桁設定で通信が出来た。
しかしながら、実際に彼がやりたい動作中にコマンド受信がしたいということには、別の困難があった。
彼が複数集めてきたスケッチはいわゆる単機能でloop関数の中でwhileループを組んでいるようなものばかりだったので、同時に処理をするためにはこうした処理をマージしなければならない。
S君とは哲学問答をするように、彼が実際にやりたいことを確認しつつそのためにはどうすべきかを解説する。
極端に言えば状態遷移図を彼に書いてもらうことだった。Arduino UNOの性能範囲で実現可能なハード設定にはなったので、この先は彼が設計をすすめることで出来てくるだろう。
彼には、時間管理も含めて指導したいので、予め帰りのバス時刻をめどにアラームをアレクサに頼んでおいた。普段ならばずるずるとやっていて母上に迎えに来てコールをしてからさらに続けるということだったが、アレクサがアラームした段階で進んできた内容を振り返りこのままでは、ここで出来ることも限られるので納得して今回は帰ってもらうことになった。小学生ではなくなり来月からは中学3年になるS君なのでそうした自立する姿も母上に見せられればと思う。年の離れた末っ子ぶりはわかるものの、逞しくなってほしい。
ルンバみたいな掃除機を作りたい(2)
サーバー構築が叶ったS君は、3年越しのプロジェクトであるルンバを再開した。超音波センサでの距離計測、衝突予防で後進しつつ方向転換をして走っていくというものだった。
Arduinoにモータードライバーを搭載して3つのモーターを駆動する。2つは田宮のギアメカだ。残り一つは塵取りに掻き込むブラシモーターの予定だ。
駆動系統を整理して超音波距離センサで方向転換が出来るのを確認して3年前の課題クリアと思いつつ、家に持ち帰ると動作がうまくないらしい。
単三電池二個を搭載したモーター用電源では、モータードライバーでのドロップも含めてモーター駆動には不十分のようだ。三個搭載の電源ボックスと交換して安定動作になった。
彼の思いとしてはリモコン制御でスタートストップをコントロールしたいということもあったらしく翌週には超音波センサを組み込んで動作させてみたけどモーター駆動中は、動作しないらしい。
距離センサとして用いる超音波センサと超音波リモコンで行う信号検出が性能的には厳しいらしいということがわかり、距離センサをi2Cと接続のToF距離センサに変えてみた。
IoTサポートをしてきた経験から検出精度は対象の差があるけれど近接範囲についての壁検知ならば動作しそうだと思い実験をしてもらった。超音波同様にまっすぐぶつかる場合には検知するのだが。いずれにしても二つないと検知できないケースもありそうだった。超音波リモコンの検出自体はするのだが、どうも検知したコードが化けてしまうようだ。モーター駆動でのノイズが影響するのかリモコン受信部のアースにノイズが回り込むこともあるようだ。並行処理をしつつの超音波リモコン機能はArduino UNOでは難しいと判断してBluetoothモデムモジュールを使うことを提案した。
Bluetoothモデム(HC-05/HC-06)は、かつて3×3のバスケットボール用に開発した12秒タイマーでスタート・ストップをリモコン制御するのに用いていたのでインタフェースのシリアル速度さえ抑えておけばsoftwareserialでも十分に検知制御できて、シリアル接続のLED群WS2812Bなどで構成した大型表示部も制御できていたので問題はないはずだった。
大量にどこかに在庫していたのだったが、部品棚にあったのはHC-05の親機が見つかった。サンプルのスケッチとスマホ側のアプリを紹介しておいたら、彼なりに自宅で接続テストをしたようで、あいにくとアプリは現在の彼のスマホではAPIがマッチしないのか動作しないようで、別のBT接続のアプリを見つけて実験をしていたらしい。
自宅での実験するなかで、どうもHC-05が正しく応答しないようで壊れているのではないかという話になり次回来た時に交換してほしいという連絡がLINEできた。
こちらでも動作確認をしようということで、古いスケッチを持ち出してみたのだが、どうにもBT接続のターミナル接続とコネクトできない・・・。
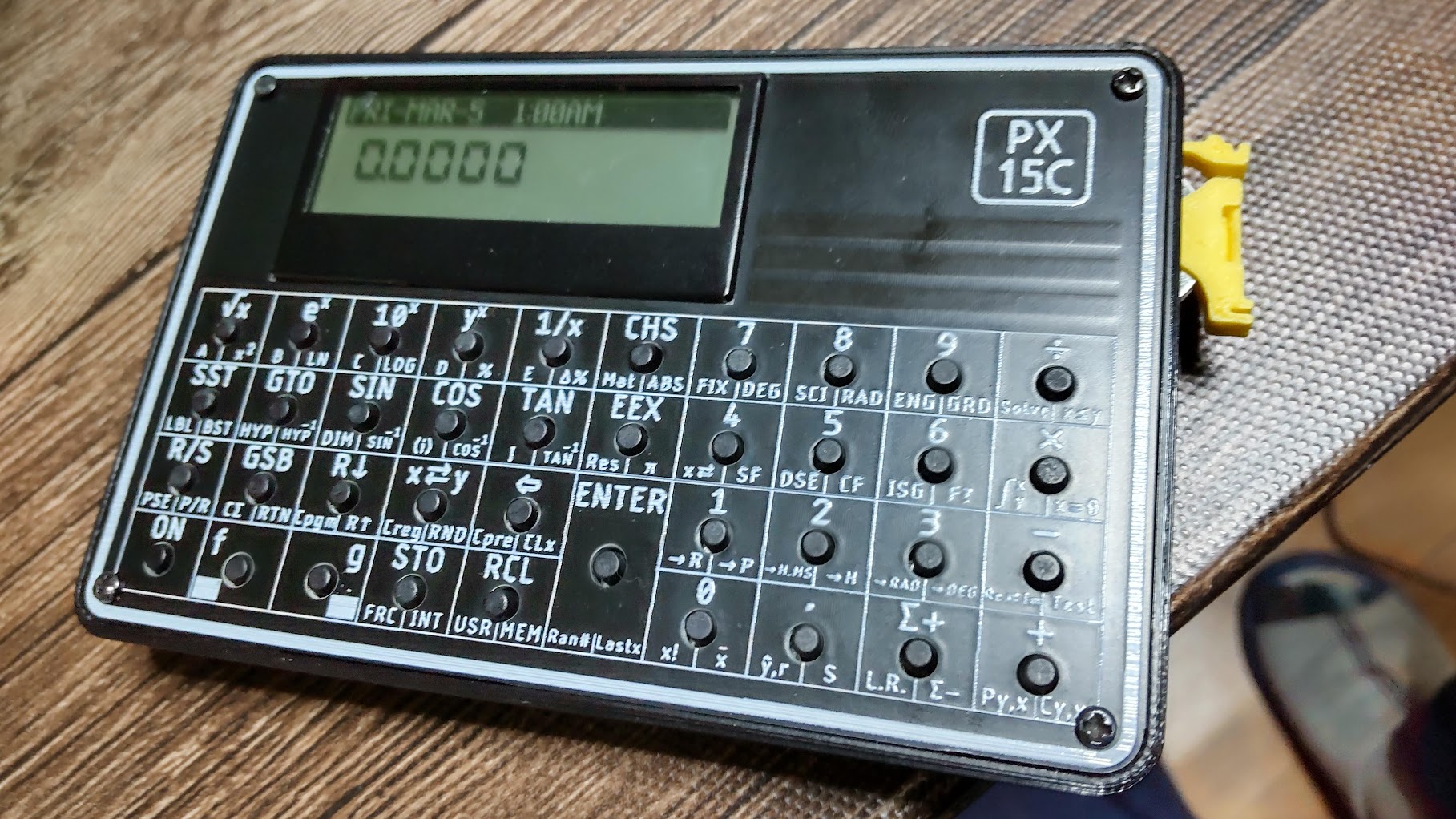
逆ポーランド方式の電卓キットを作ろう
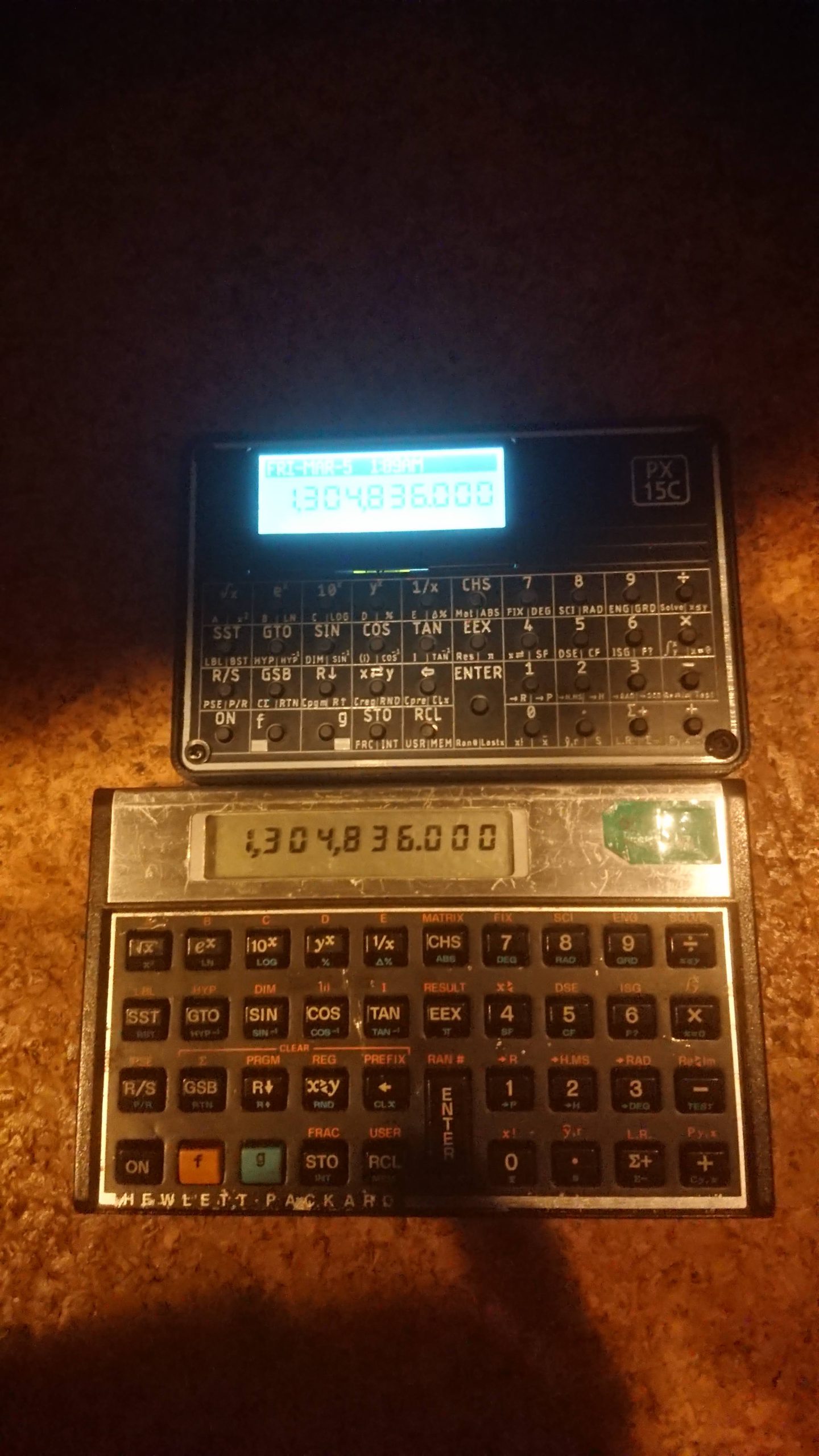
組み込みの里で、長年利用してきた逆ポーランド方式の電卓が多数ある。歴代使い込んできたモデルを中古で再入手したり、最新型モデルを買ったりとしてきた。写真にあるのは日常に利用しているHP-15Cというものだ。動作ステップをプログラミング出来るものでもある。
この逆ポーランド方式の電卓には=キーがないので、困惑する人が大半だ。学生時代から誰かが借りていっても使えないといってすぐに返されるというメリット?もある。
複雑な計算式を解法していく上では綿密に対応する括弧を確実にインプットしたりすることもなく、最奥の点から手計算で解いていくというやり方なので逆にインプットミスも少ないのだ。当時は日本語方式と呼んで売られたりもしていた。
3に5を足すという形なので 3 に 5 + というステップで答えが出る
計算式通りというやり方だ 3 + 5 = となる。
逆ポーランド式(RPNと略す)の電卓では区切りとなるキーがENTERというものになる。
スタックは4段あり、最上位(X)が表示されている。
ETNERというキーが操作されるとそれまで入力された数値・結果がスタック(Z->T, Y->Z, X->Y)にプッシュされる形になる。
二項演算をした場合にはX, Yで演算を行い、スタックから
順次ポップ(演算結果(x,y)->X, Z->Y, T->Z, T) されてくる。
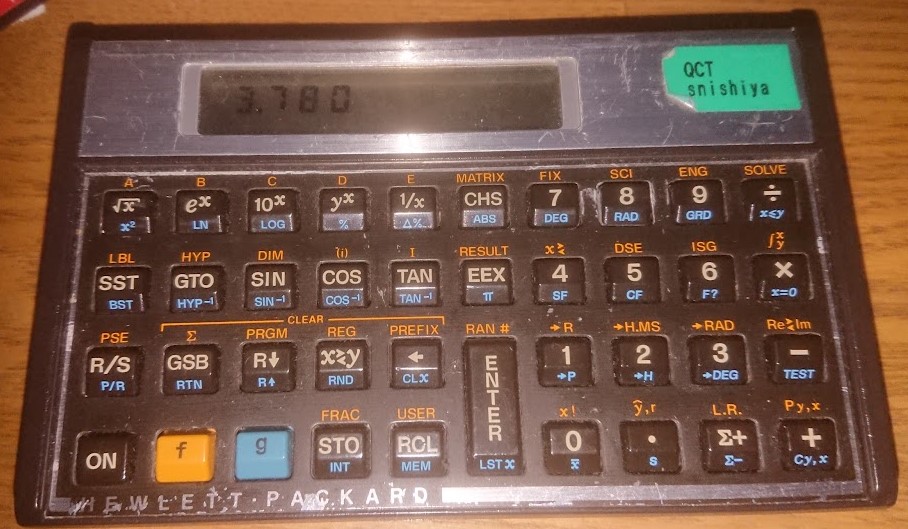
今回作ろうとするモデルは、この写真の機能を実現したキットだ。
メキシコの方が設計されて出されている。基板や部品は中国で手配されているようだ。
以下のサイトで販売されている。今回はアルミパネルと3Dのケースを手配したので
63ドルほど、更に送料がFedexで25ドルかかった。
https://www.tindie.com/products/hobbystone/px-15c-an-hp15c-emulator/
表面実装部品はないが、沢山のタクトスイッチを揃えて実装するのは少し大変だ。
なお3Dプリンターでケースやキートップを作り、PDFのラベルを貼り付けるという形も取れるようだ。その場合は50ドルくらいになる。




セオリー通りに背の低い部品から実装していく。
タクトスイッチはそれぞれ1ピンだけ半田付けをして、都度垂直を整えてから次のピン
を半田付けするという形で進めていく。

液晶表示器の下にATMEGA328が実装されて、液晶表示は両面テープで留められて
基板とはヘッダーを半田付けして接続される。ファームの書き換えは、背面にコネクタがある。キットのマイコンにはファームが書き込まれている。
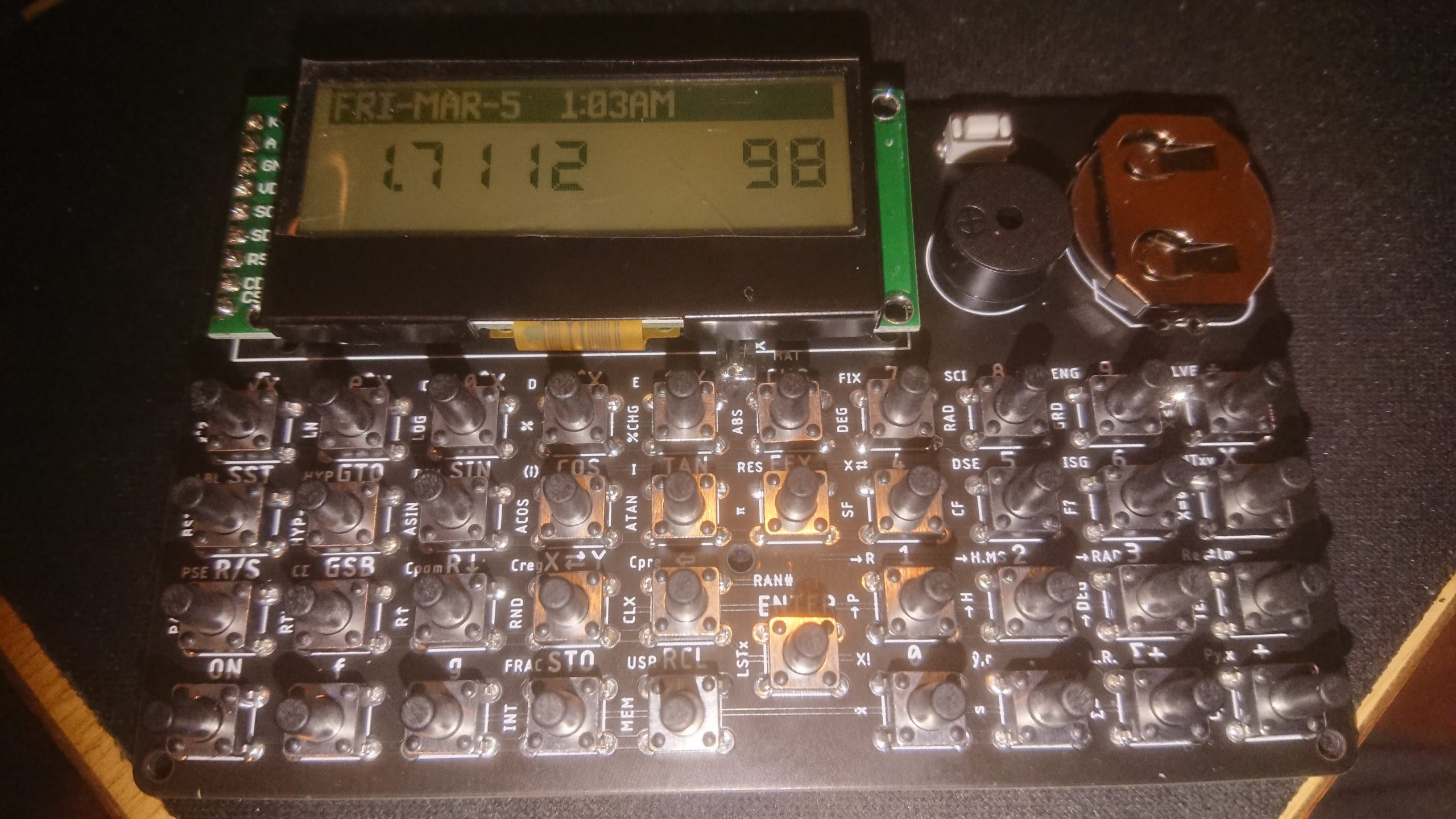
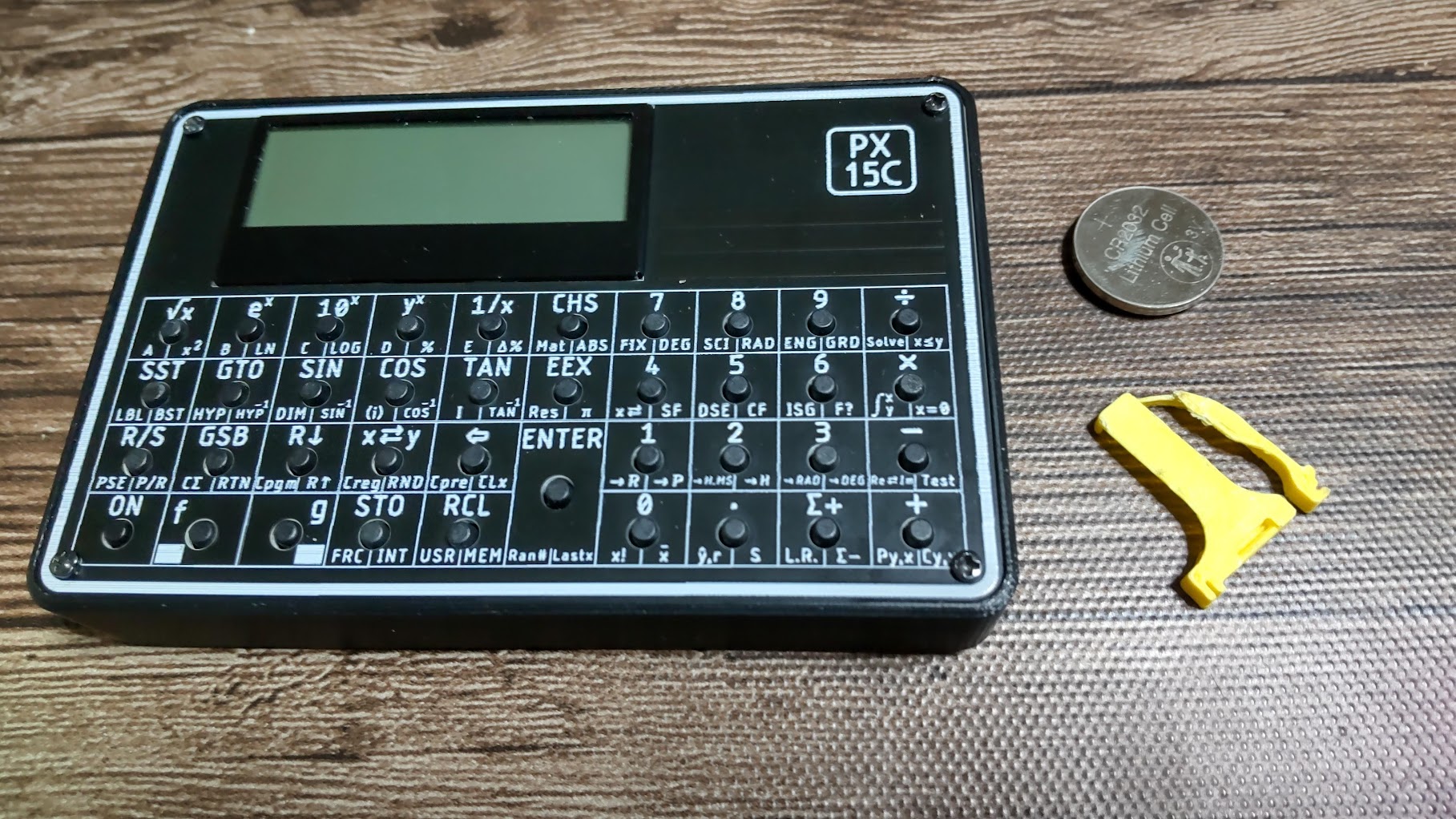
バックライトが付くのは実機にはなかったことでした。
大きさを比較すると少し小さくて、厚いです。
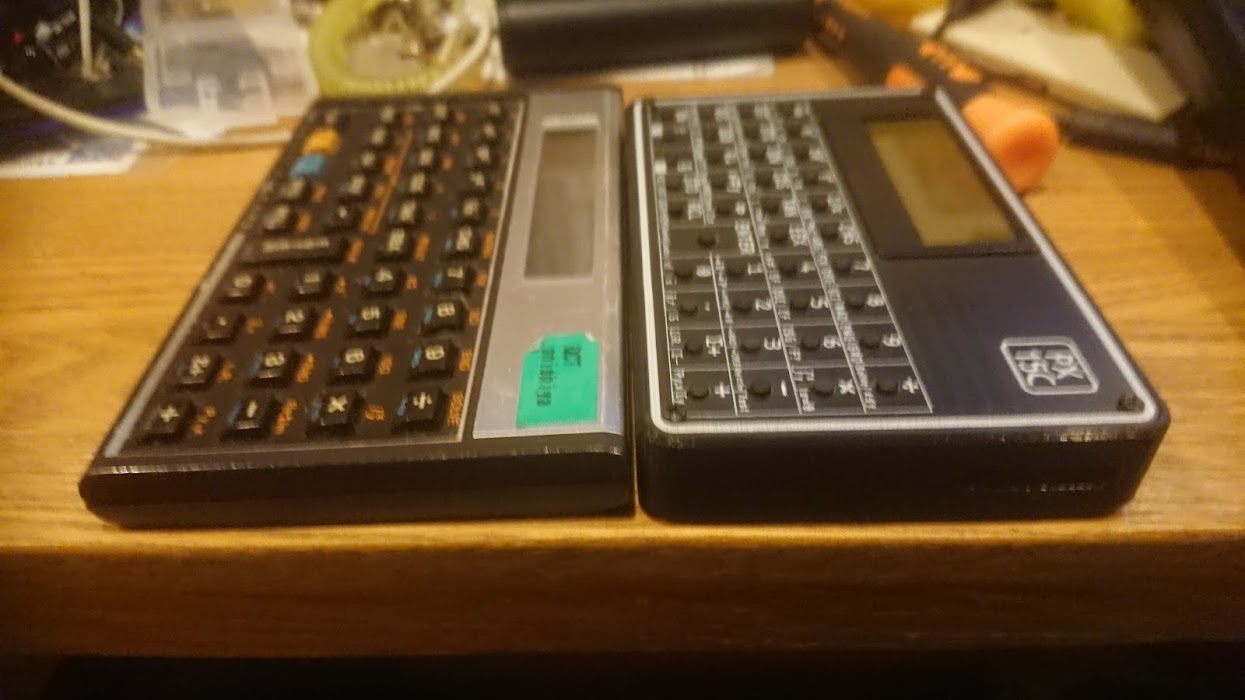
電池はCR2032を無骨に挿入する形なので交換するのに
振り回すか、ドライバで開けるしかない状況でした。

対策として電池を交換できるためのハンドルを設計しました。
こちらの載せて挿入すると取り出すときにはつまんでロック
を外して引き出せるようになります。

PLAで作成しました
電池向きを合わせてキャリーをかぶせます
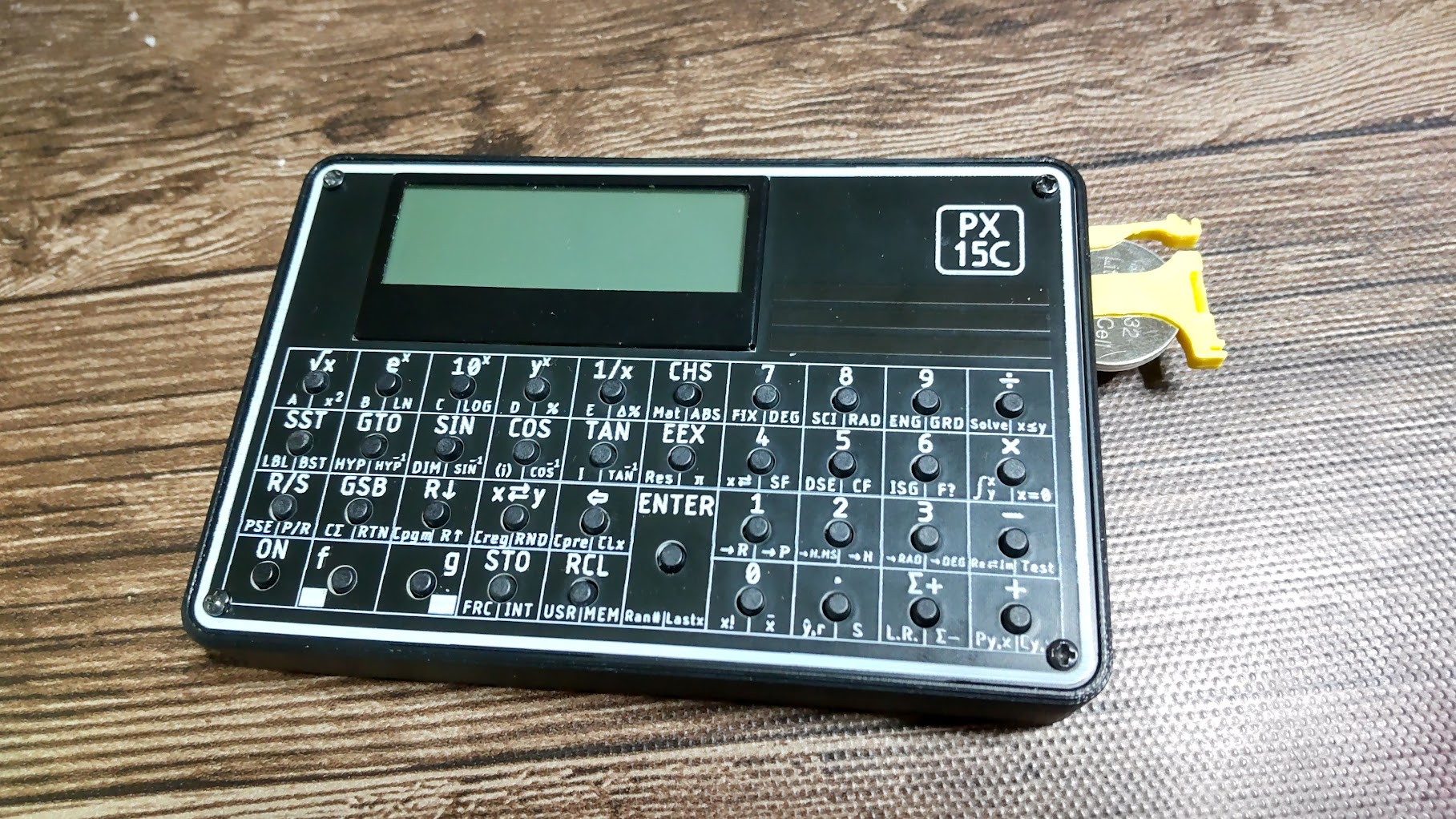
出すときには、少し出ている爪を挟むことで引き出せます

Arduinoで学ぶ組み込みハンズオン合宿をしてきました(1)
先週末11/24と11/25は、依頼された組み込みハンズオン合宿の講師をしてきました。開催場所は茨城県神栖市の旅館を借りてのものでした。オープンソース活用などを進めておられた知己が地元の母校(波崎工業高校)の後輩たちもターゲットにして開催する刺激を与えることを目的として企画されましたが、実際には若手抜きでの開催となり準備推進といった様相となりました
先日開発したスポーツ用の12秒タイマーの実装例などの解説を中心にしてカスタマイズや、センサー・アクチュエータを活用できるところまで参加された方々のIDE環境のセットアップから二日間で漕ぎつけるというものでした。ほかにも教育研究されている宇都宮大学の先生や波崎工業高校の先生のお話も交えての内容で縦軸が私の担当するハンズオンの合宿でした。
地域の工業高校生の参加勧誘に向けては、社会連携などの活動としてのお話しにつなげていく中でのものでしたので準備に手間取り実際の生徒さんたちの都合には十分な宣伝期間などが不足して、社会人の方たちの参加のみに限定されましたが教える側としてのトライアルとしては寧ろIT環境になれない方たちも含めてのものとしての挑戦でもありました。
最初に、自身の邂逅となるマイコン遭遇となる組み込み人生について自己紹介をかねての経歴説明の中でマイコン開発の進め方にどう携わってきたのかを話して開発環境への取り組みが35年ほど遡る時代背景での高級言語Cのマイコン実装実現での経験について話をして、現代にいたるまでの話をつなぎました。これには今日のハンズオンへの伏線を隠していました。同様な内容は先月開催されたヒューマンネットワーク高専の全国交流会でのプレゼンと被ります。
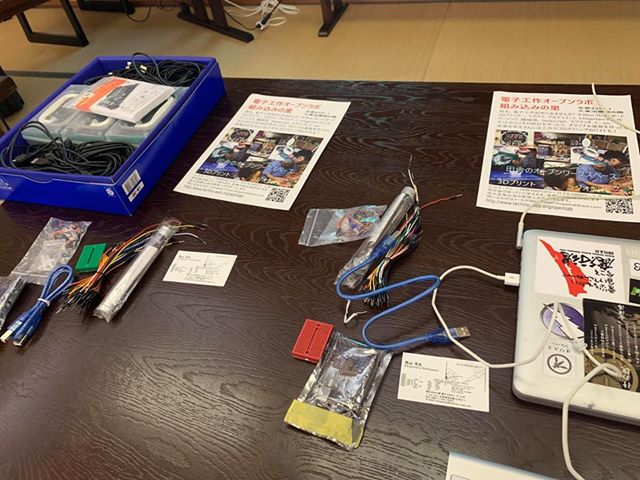
手元に皆さんが使えるようにしたのは中華製のArduino互換基板です。今回参加された方々はUbuntu, Windows, MacOSと様々なタイプのマシンを持ち込まれていたのでIDEのインストールを通じて最近のライセンス問題やArduino自身の出自や、Arduinoプロジェクトの御家騒動、USB変換チップの模造品問題などについても触れて今回のものに搭載されているものが中華国家が推進しているCH340が搭載されていることに触れて、識者の方にも経験のあるUSBケーブルが動作しなくなったある時期の時代背景についても触れて実態について紹介しました。こうした技術上の現代史を知らないまま、これからの時代を生きていくうえでは重要な点と理解しています。
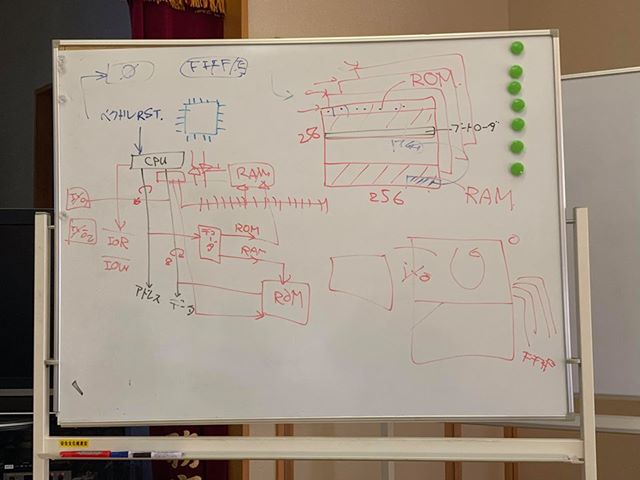
折角の機会なのでマイコンの構造を解き明かしつつ内部の構成についても解説を加えるという回りくどい教え方でもありました。

Arduinoのベースとなるマイコンの基本を知ってもらう意味で機械語の動作が目視でみたりすることが出来るマイコン黎明期に登場したAlnair/IMSAIなどのレプリカマシンであるLegacy8080(科学少年出版)を持ち込みマイコンとしての動作の概念であるメモリ、バスライン、デバイスの仕組みについて解説して自身が開発して成果を上げてきた話とシンクロしながら説明をして、組み込みの基本となるリセットからのマイコン動作も含めてデモすることで実際にマイコンをステップ動作させることで理解した雰囲気に導きました。
Arduinoの良いところはプロトタイピングのために徹底した抽象化が図られていて本当の意味で知らなければならない細かい所作については理解しなくても使い込んでいくことが出来ることでもあるのですが、そうした隠ぺいした部分について詳細な理解までは別にして気にする程度に説明することで実際のモノづくりに必要なことを実装例を通じて示していきました。
実際に作ったスポーツタイマーは12秒計測を行う大型のLEDでフラッシングを脈動するような形で色や照度を変えつつ表示計測して任意に停止したり巻き戻したり進めたりという実現したものの説明を先に行いました。これで参加される方がこれから説明しようとするものについての動作上の理解をしてもらうことが出来ました。
具体的な動作例を示すことで、その中身のソースコードを説明していくことで必要な記述が何を示していくのかについての関心が増します。
150個のLEDピースが連結されたNeoPixelというデバイスが三本の線で接続されていることを示しつつ、信号線の定義をソース上で行うこと、実際の基板の上での読み方や複数のピンが存在する中で使える二つのタイプのピンAnalogの入力にもつかえるピン、デジタルの入出力に使えるピンなとの機能についての説明や配置上の自由などにふれ、これから制御しようとしているLEDのシリアルテープ構造のもの自体が一つずつにマイコンが搭載されていて3色のLEDの色情報と輝度情報を持っていることを教えます。セグメント構造、色の制御、時間経過での色と照度変化のための構造定義とロジックについてから前後しますが、ArduinoのプログラムにはMainが存在せずにSetupとLoopしかないことを説明して、普通のブログラミングであればMainから終了すると終わってしまうのが、Setupが最初に一度だけ呼ばれてから、Loop関数は繰り返し呼ばれてしまう構造であることを伝えて、ようやくソフトの制御の流れについての読み方を説明していくことを伝えます。スポーツタイマーではBluetoothの端末からのコマンドで動作することを示していたことは示していましたが、あえてシリアルインタフェースは使わずにソフトシリアルを使っていることを理由も含めて説明していくことで深みに嵌めていきました。
7セグメントの構造の1.5桁構成の表示機で制御するためのLED構造が数珠つなぎで一番Arduinoに近いものからアドレスが降られていることを伝えて制御したいセグメントを定義するスタートとエンドの番号を定義していく箇所。
そのセグメントが0から12までどの様に点灯するのかということを定義したデータ配列。
三色のバランスを段々変えていき、緑から始まって、徐々に赤くなっていく色の変化を定義した配列。
一秒刻みで毎回ハッキリと輝度を上げて表示しつつ経過時間で薄くなっていくための輝度調整の計算ロジック。
以上開発した関数を組み合わせて、ある経過時間での残り時間を、その時の秒数と、その時の輝度と色で150個のLEDに与えるデータとして編集する関数群として呼び出す仕組み。
最後に一気にそのデータを瞬間的に高速に払い出すための関数。
TA7291Pでリレー制御
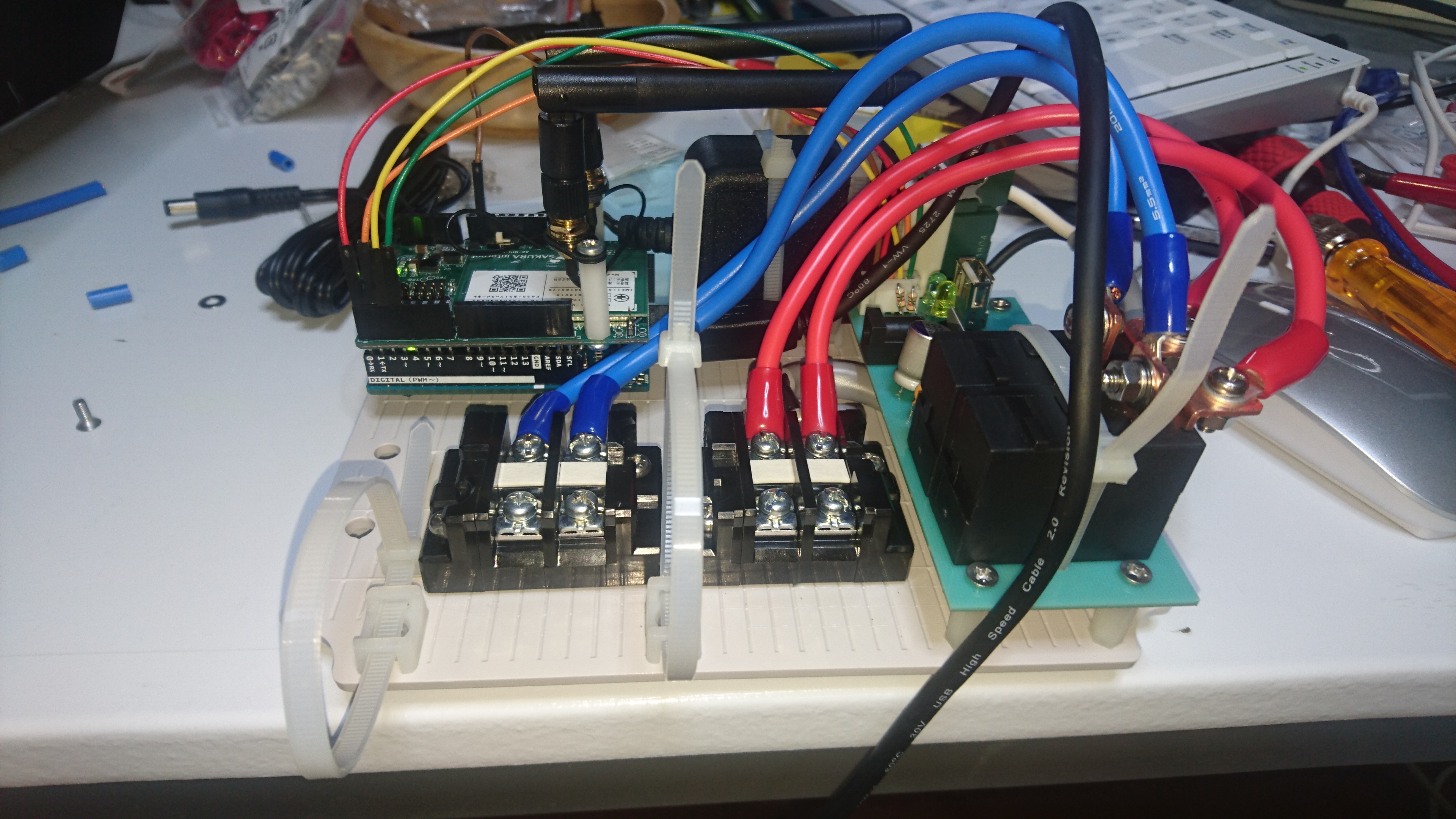
IoT機器開発の依頼がありコンサル対応しています、ラッチングリレー制御をネットで行いたいということでArduinoとSakuraIOに繋がるrelayシールドと、その筐体実装のサポートをしました。プロジェクト自体は現役高専生がベンチャーの会社で任されて進めていて、組み込みの里ではそのフォローサポートならびに試作製造といったことをしています。
途中経過は、試作基板を削りで作成していましたが、最終的にシールド基板のみを開発することになりました。
量産基板には設定切り替えなどをJumperで出来るようなフットプリントを付けようとしているのですが、使っているKicadが色々と難癖をつけてきて妥協と解析対応をしつつ進めています。
若者がモノづくりの主体として関与するこうした取り組みを任されているベンチャーの方とのコラボはとても良い実体験になると思います。スマートに解決できることばかりではなく、お客様との打ち合わせなども体験しながら進めているプロジェクトの発信源は、やはり高専OBの熱い方でした。
仕様変更の調整なども踏まえて少し余計にかかりましたが、夏休み前にお話しを聞いていた時から長い高専生の夏休みの実務アルバイトは大きなインターンシップ以上のものになっていると思います。
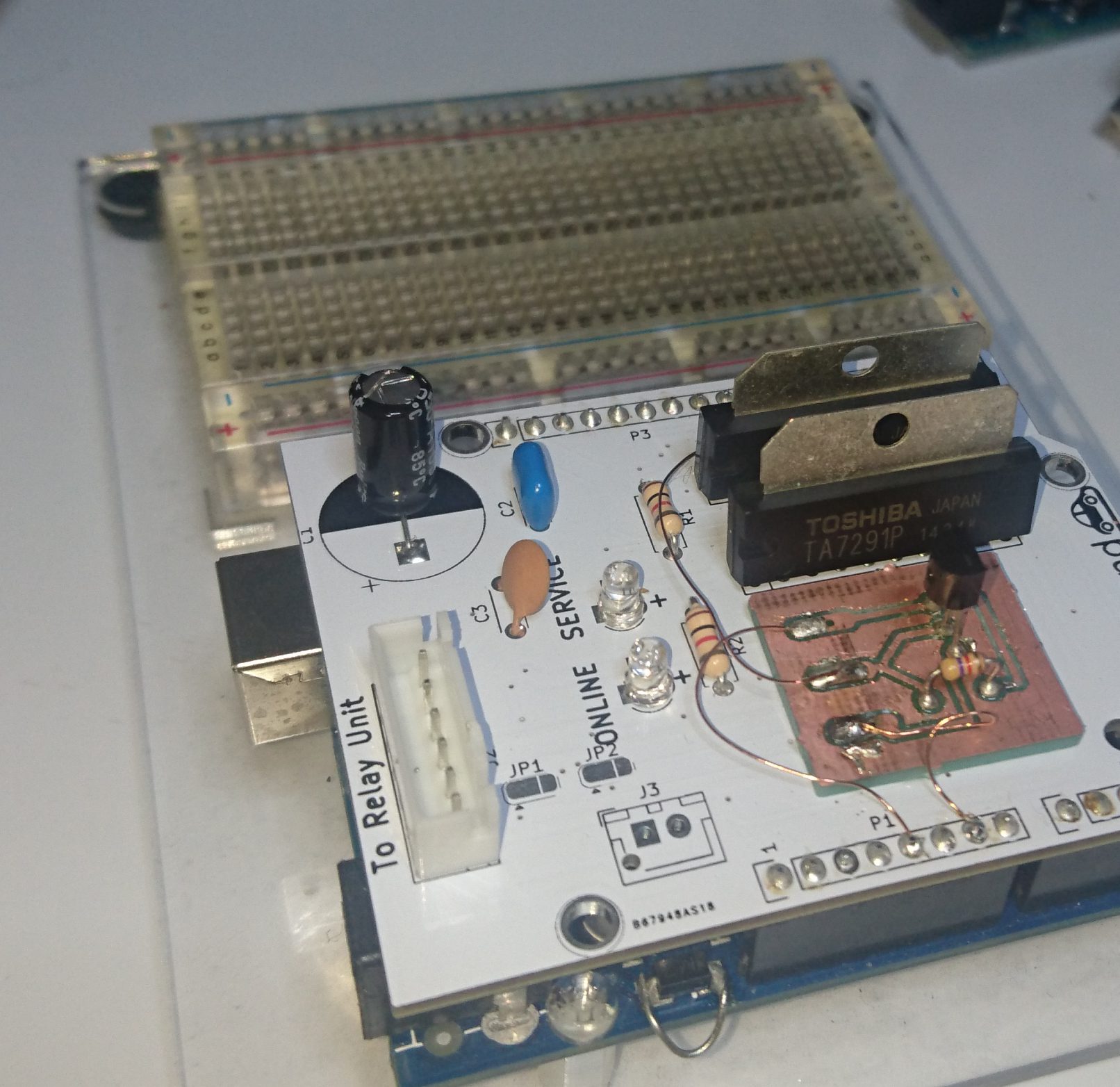
試作基板には、仕様変更の対応でターゲット装置の遠隔監視などの観点で温度センサーが追加で実装されることになりました。ユニバーサルエリアを作らなかったので孫基板の実装となりました。
里では何年か前に話題になった例の温度センサーを使っています。(Hi)
NC加工をしてみる(4)
今回のお題は、市販の防水樹脂筐体に収めるある程度数を作ることを想定したモノづくりのお手伝いだ。里の加工で出来ることはしれているのだが、そこはベンチャー会社の人たちにしてみたら他に頼むことよりも出来るだけ作れるものなら最初にどこまで作れるのかは知りたいということらしい。
基板手配は、当初の課題だったが、サイズの問題などからEAGLEからKiCADに移行して新しい機能などを覚えて試作品としてOriminを用いたUSBCNCで削り出して試作評価というフェーズが簡単に崩れてしまった。良くも悪くも今までの使い方がCADというよりもアートワークを手で引いているようなPCBEだったりしていたことから制限を外して挑戦しようということでもあったのだが、試作用もう少し融通の利く環境構築も必要のようだ。
基板がとりあえず、KiCADのアートワーク状況を手コピーしてPCBEのスクリーンにプロットしていくのだがPCBEの柔軟な運用としてプロットポイントを自在に原点調整やピッチ変更が出来るのが幸いしてほどなく出来るのだが、あいにくと強度が必要なUSBコネクタやDCジャックの類の角穴などは折角モデルを使ったのが仇となっていたので丸で近似するしかなかった、作図は簡単だがはんだ付けの苦労はありそうだ。
これやArduinoの基板をスペーサーで保持するのだが、その設置用の穴開けが課題になりそうだということは先週のトライアルで分かった。穴あけ位置を指示する樹脂製のテンプレートを作成してそれ越しに穴あけをすることにした。これを作るのは今回は3Dプリンターで少し垂直のガイド性もつくようにした。
結局Arduino以外も含めて全体のテンプレートが丁度3Dプリンターで作れそうなので穴のサイズごとに色指示のシールを貼って効率が上がるようにしてみた。
Arduino UNOには使えないコーナーピンが一か所あり、設計上は3mmのビスを使うことになっているのだが実際にあたってしまいネジ締めが出来なかったりもしているので、ここは2.6mmのネジを一か所だけ使うようにした。そんなこともあったれして実はバタバタとしたNCデータの流用だった。転写する段階で読み間違えたりしてサイズ位置が合わなかったこともあったので、もう少しレビューを落ち着いてしたほうが良さそうだった。問題のUNOのマウントには樹脂製のスペーサーを使わないと背面のパターンも当たってショートしそうな感じもしたので手持ちのジュラコンのパーツを見つけ出してくみ上げてみた。
明日、全体試験をしてもらって来週はいよいよ顧客先で稼働評価試験となるらしい。
大型タイマーパネルを作る

大型のタイマーを作ることになり、開発要請元のご希望はアクリル板でカバーしてほしいということでしたので背面をマットな黒アクリル、前面を透明アクリル板で構成して間にNeoPixelのLEDを並べるというもので、透明モールを使うというものと、防水カバー付きのNEOPIXELをそのまま使うというものの2種類を作りました。アクリル板を挟み込むのはアルミチャンネルで、コーナーにカバーとコアとなる部品を2つ3Dプリンターで作り構成しています。



Arduino入門キットを寄贈いただきました
多賀様から、Arduino-UNO、Groove用シールド、スイッチサイエンスさんのArduinoを始めようキットのセットを3式寄贈していただきました。Arduino-UNOを利用していろいろと実験されたい学生さんに無償でご利用していただけます。
多賀様まことにありがとうございました。
旧友が訪ねてくれました

松下通信時代の旧友たちが、里を訪ねてくれました。F君は同世代で、T女史も少し下ですが昭和な時代を一緒に開発に取り組んでいました。今回は、野菜工場謹製のレタスをいただきさっそく皆さんでサラダにしてランチにいただきました。

田舎暮らしの別荘ライフは、考えたことがないらしいF君も興味があるようでした。
T女史は私が出向していた会社で今は仕事されていて今回はArduino環境の構築と古いPCのUbuntu対応の改造に取り組まれてきましたが、ちょっと時間切れとなりPCは、里に入院することになりました。
Vista世代のマシンでしたがメモリ増加とHDD->SSD移行などをトライしています。
クリスマス用のデコレーションを3Dプリンターで作ってみる
秋葉原で電子工作スペースを運営しているアセンブラージュさんが、アキハパラ キラキラ化計画というイベントを企画されている。参加された方が実際に電気街でクリスマス期間に使われるイルミネーションを作成するワークショップで、作成物は展示期間後に渡される形だそうです。ヒューマンネットワーク高専としてアセンブラージュさんの応援をしているので、普段やっていることで何かお手伝いできることはないだろうか考えて材料を探していましたところ。
100円均一ショップで売っている耐震ジェルを見つけました。6個セットです。
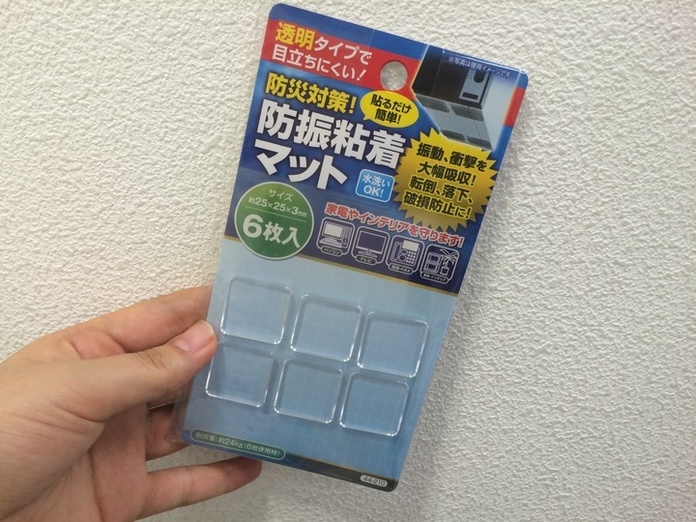 この粘着性の柔らかい樹脂(エラストマーゴム)はサイズが25mm四方で厚みが3mmというものです。
この粘着性の柔らかい樹脂(エラストマーゴム)はサイズが25mm四方で厚みが3mmというものです。
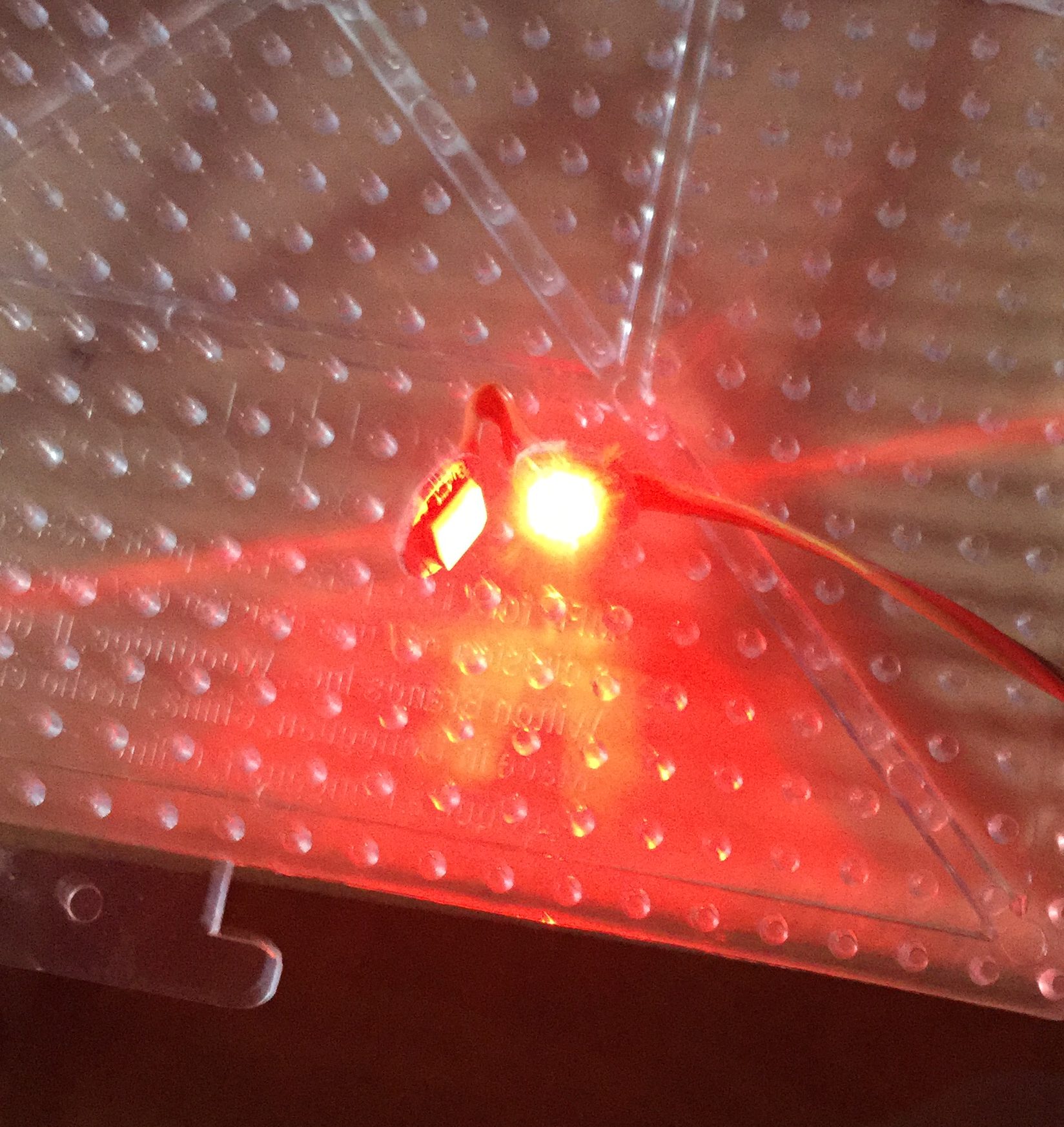
間に紙でアイコンを切り抜いたものを挟み、横からLEDで照明して両サイドからアイコンが照らされて浮かび上がるという作戦です。
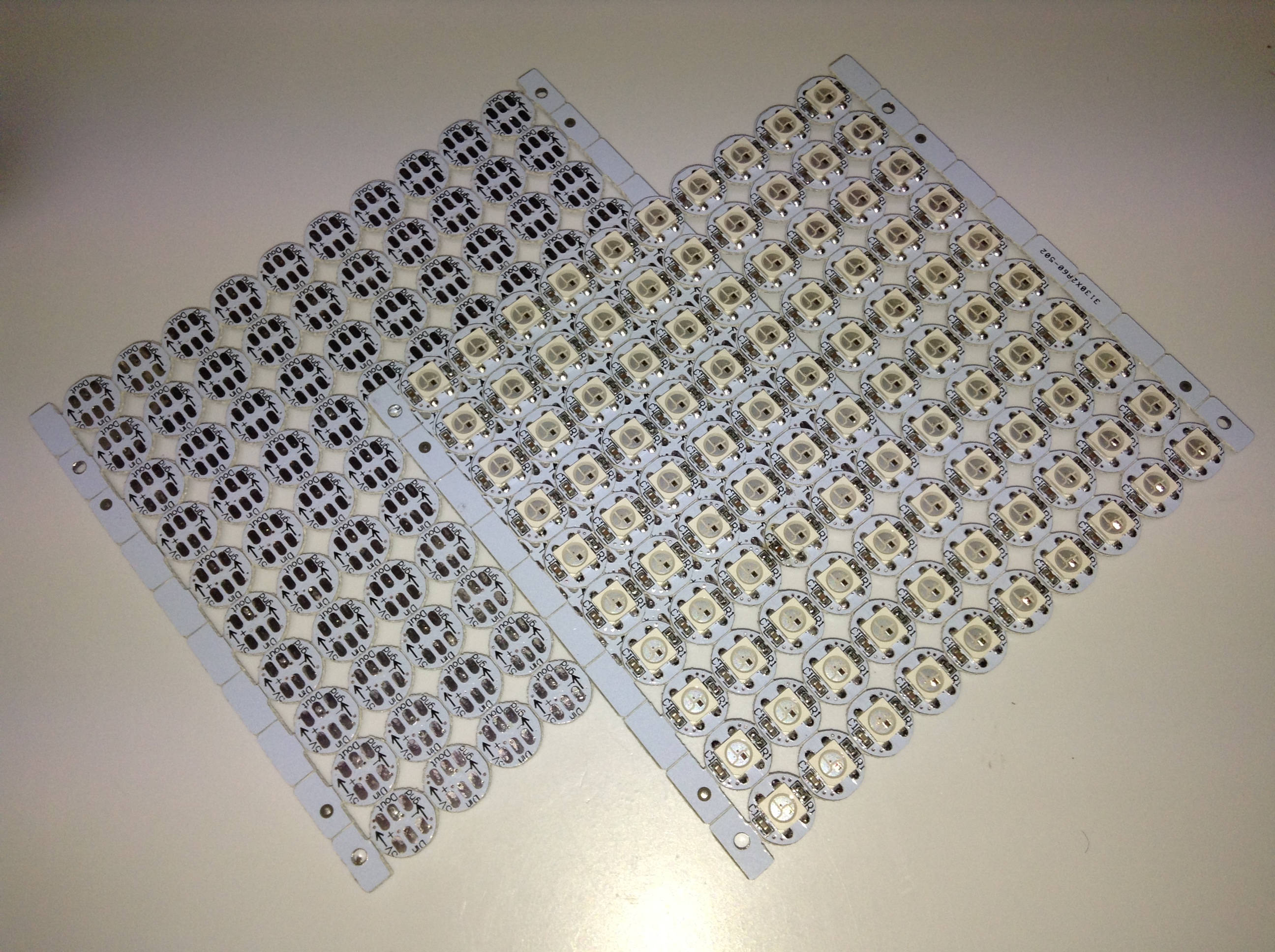 使うLEDはフルカラーでシリアル制御可能なWS2812Bの基板実装済のもので、10mm径の円盤で厚み3ミリというものです。
使うLEDはフルカラーでシリアル制御可能なWS2812Bの基板実装済のもので、10mm径の円盤で厚み3ミリというものです。
IchigoJamでの制御可能にするという課題についてはIchigoLampというパッケージをLPC810に焼きこむことで対応するというのが槙野さんところでの方針らしいので、それに準じます。
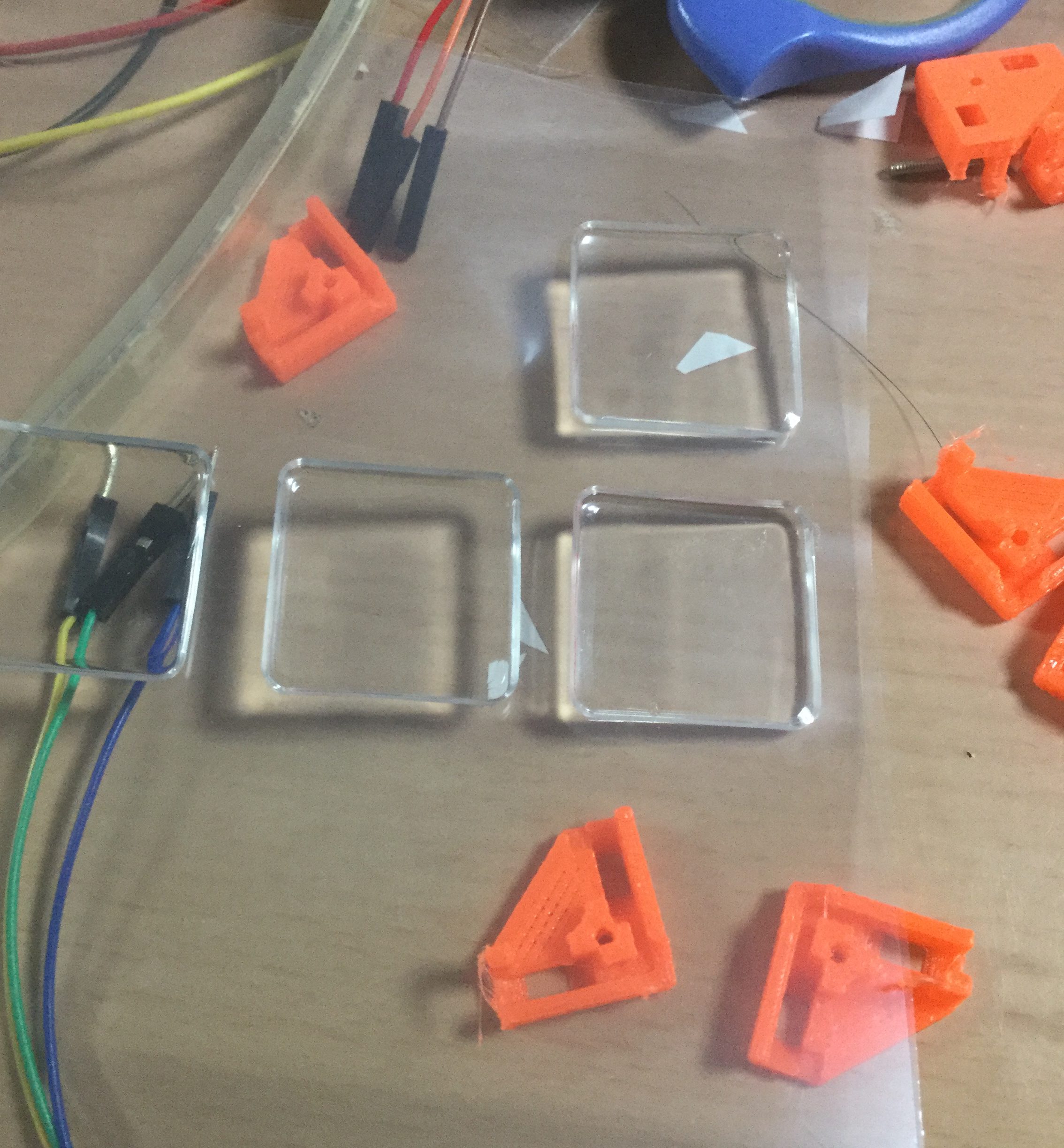 とりあえず、エラストマーゴムと基板二つを挟み込む樹脂パーツを3Dプリンターで試作してみました。
とりあえず、エラストマーゴムと基板二つを挟み込む樹脂パーツを3Dプリンターで試作してみました。
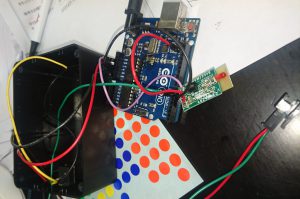
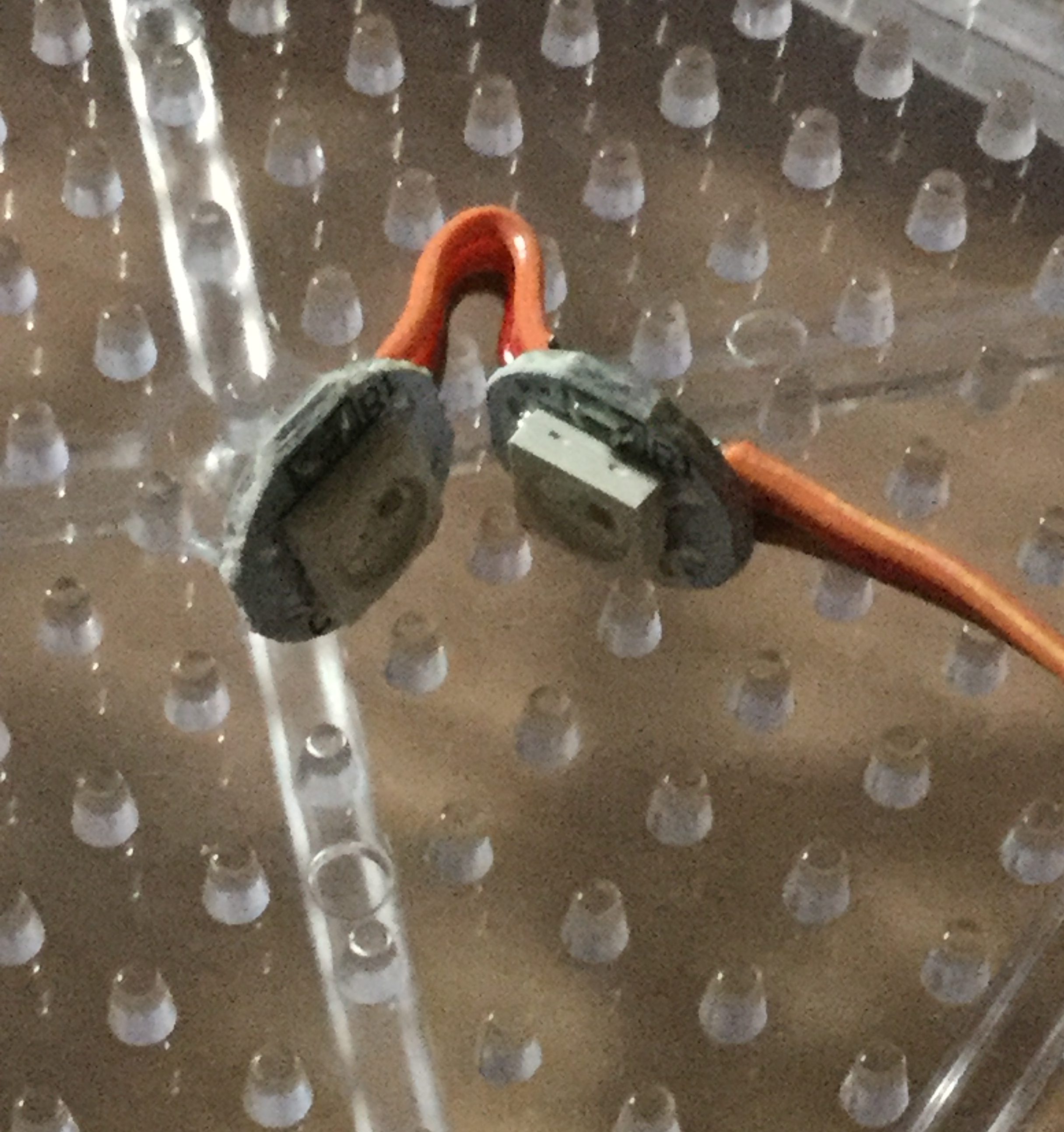 基板の実装イメージはこんな形ですが、給電配線は方向としては、間違いで中に向けて入りと出の双方でY字を描くようにするのですが、まずは点灯してイメージの確認です。
基板の実装イメージはこんな形ですが、給電配線は方向としては、間違いで中に向けて入りと出の双方でY字を描くようにするのですが、まずは点灯してイメージの確認です。
 でこんな感じです。
でこんな感じです。
しかしながら、実際に試作したケースでは、この太い給電線を収容できなかったので・・・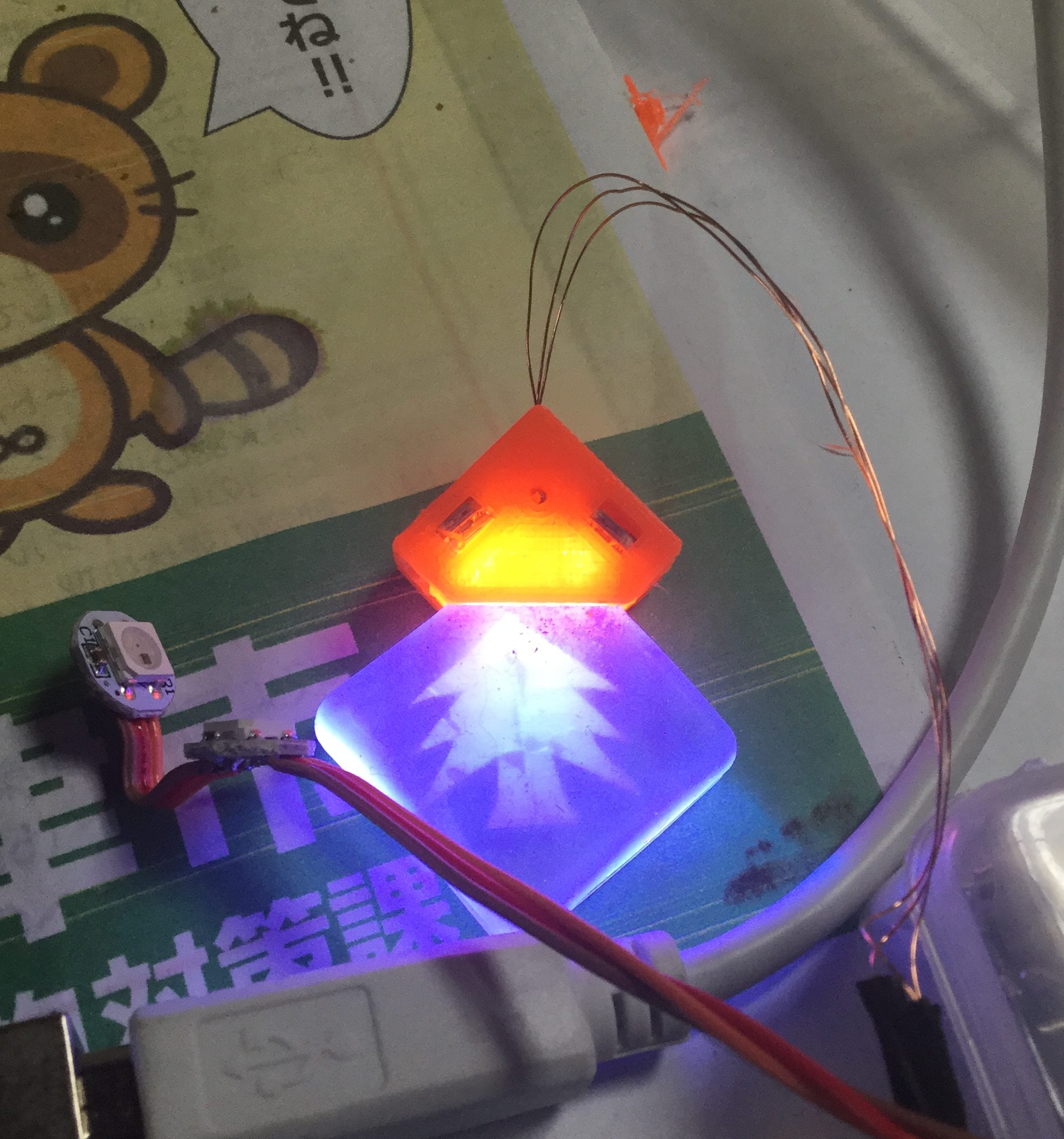 ワイヤリングペンで配線することで、まずはアイコンを挟んで照らすことを評価しましたよ。色を変えてみてもよさそうでした。
ワイヤリングペンで配線することで、まずはアイコンを挟んで照らすことを評価しましたよ。色を変えてみてもよさそうでした。
コントローラは、とりあえず、ArduinoにNEOPIXELのスケッチを入れて評価しました。
収容部分の給電線の余裕をみた形にして3D設計しなおして作成したものは、こらちにUPしてあります。
エラストマーゴムは粘着性ですので、表面にもゴミが付きやすいのですが、この用途に限っては汚れてもグミのような感じになるだけで、照明の結果としては透明よりも良い感じになるようです。
むろん取り外して洗えますので、問題はないです。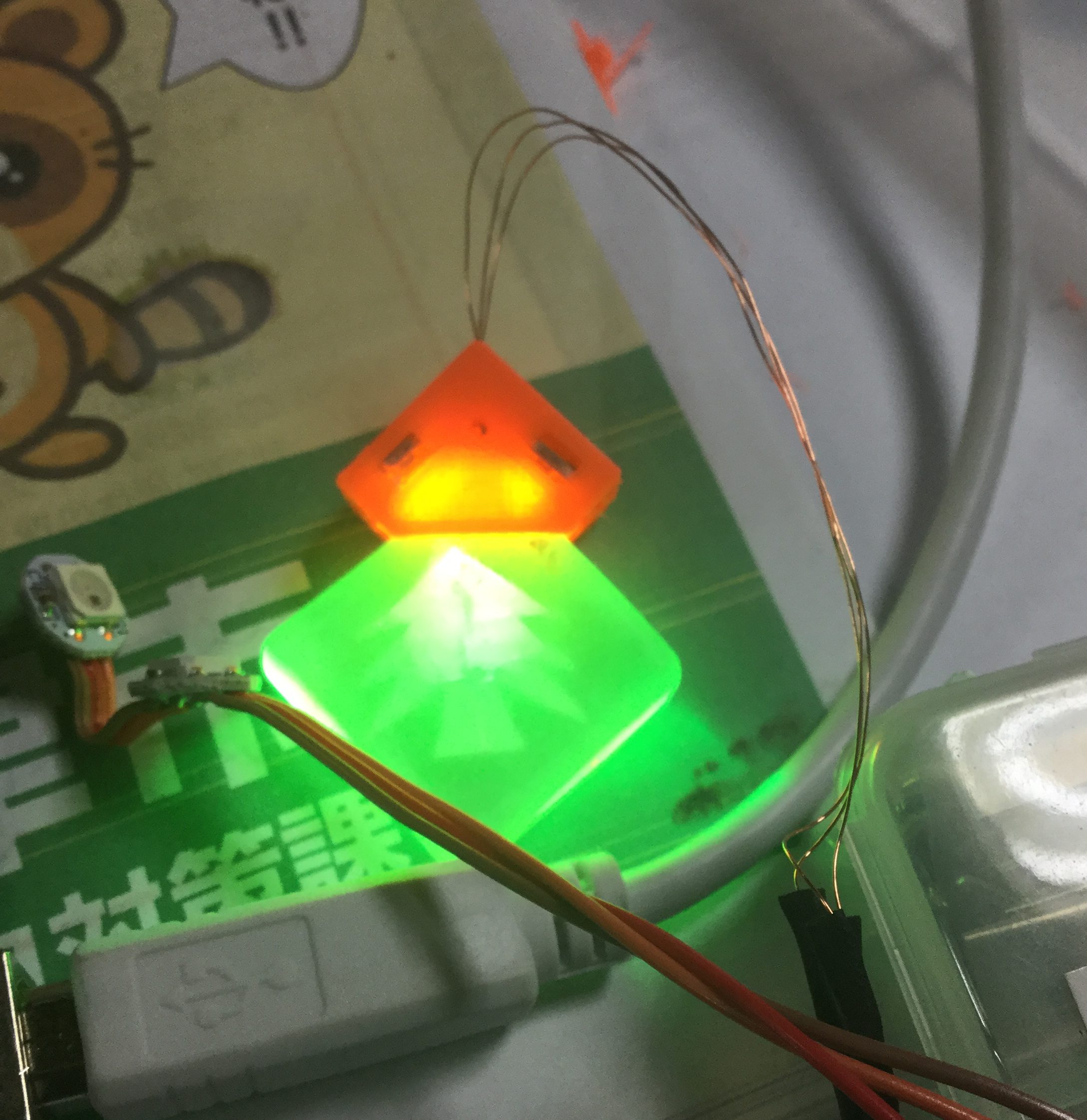
嵌合に使用したネジはM2の8ミリです。
IchigoLampやArduinoなどからの給電能力から考えると、このペンダントとしての連結制限は6個くらいかもしれません。(12個のWS2812B)
輝度を下げる指定をすれば増やすことは可能ですし、別電源で供給するならば問題はありません。
作成しました3Dプリント部品やWS2812の基板については頒布いたしますので、希望者はお知らせください。