里に設置している3DプリンターはKickStarterでスタートしたモデルで現在は進化したものが製品化されていますので、出来るだけ製品に近い性能が出るようにupgradeを続けています。
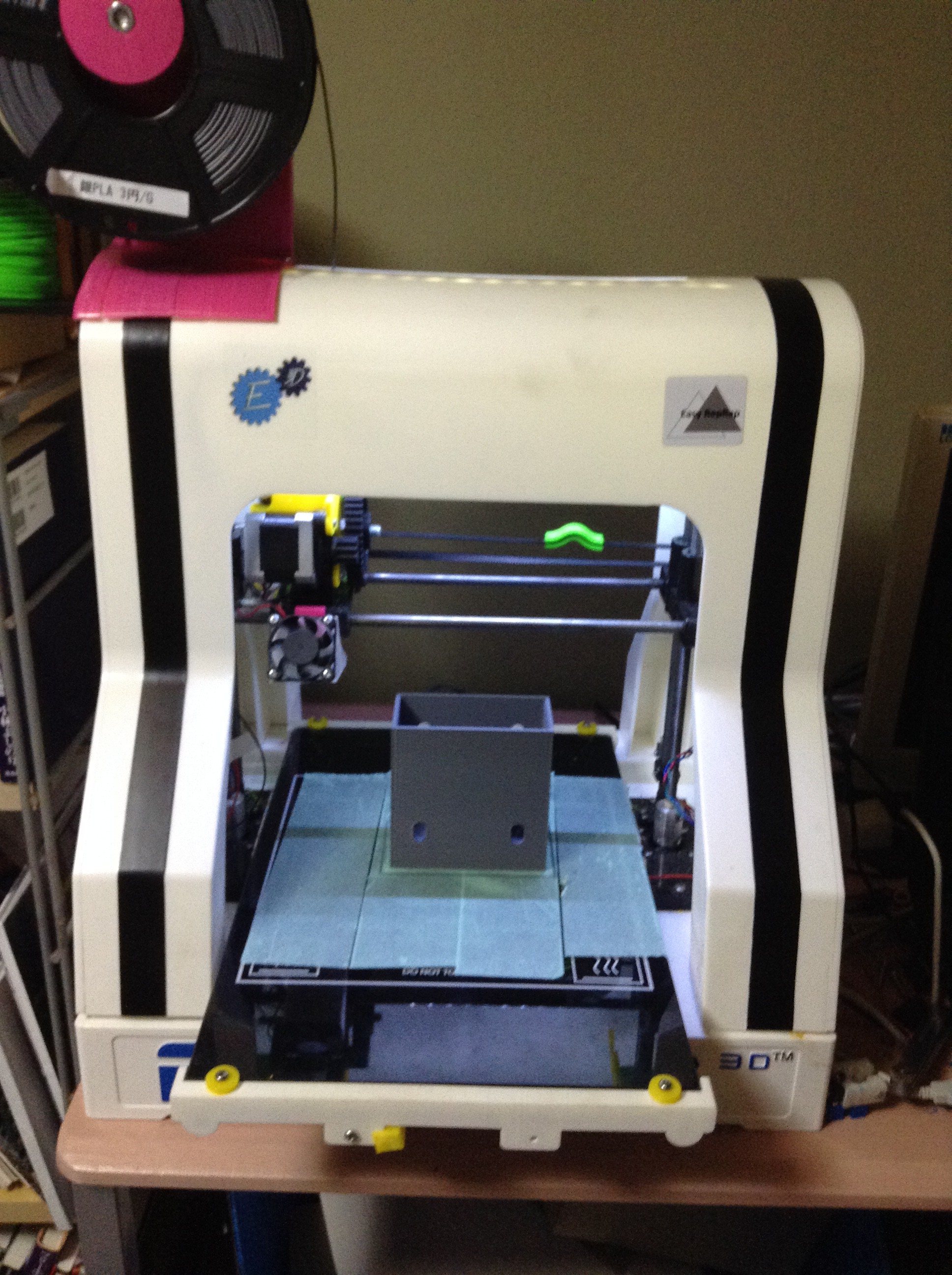
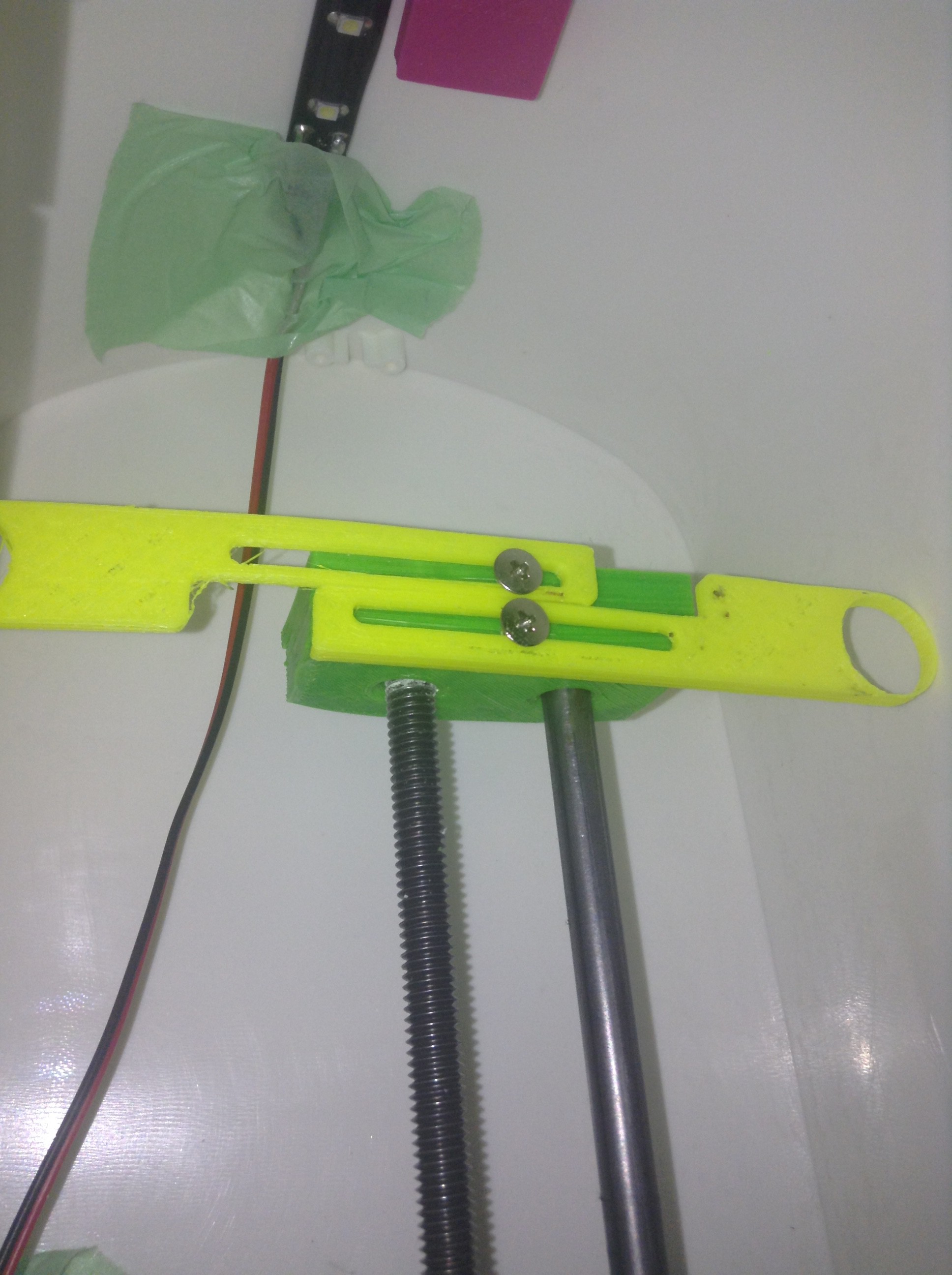
以下の写真にあるようにプリントヘッドを支えているX軸(左右)のレールがZ軸のロッドで上下します。今回の変更で下側にマイクロスイッチが付けられています。Z軸(上下)のゼロ点設定が、ヒートベッド上のマルチポイントで測定されてテーブルやレールのひずみを補正するという動作になるそうです。
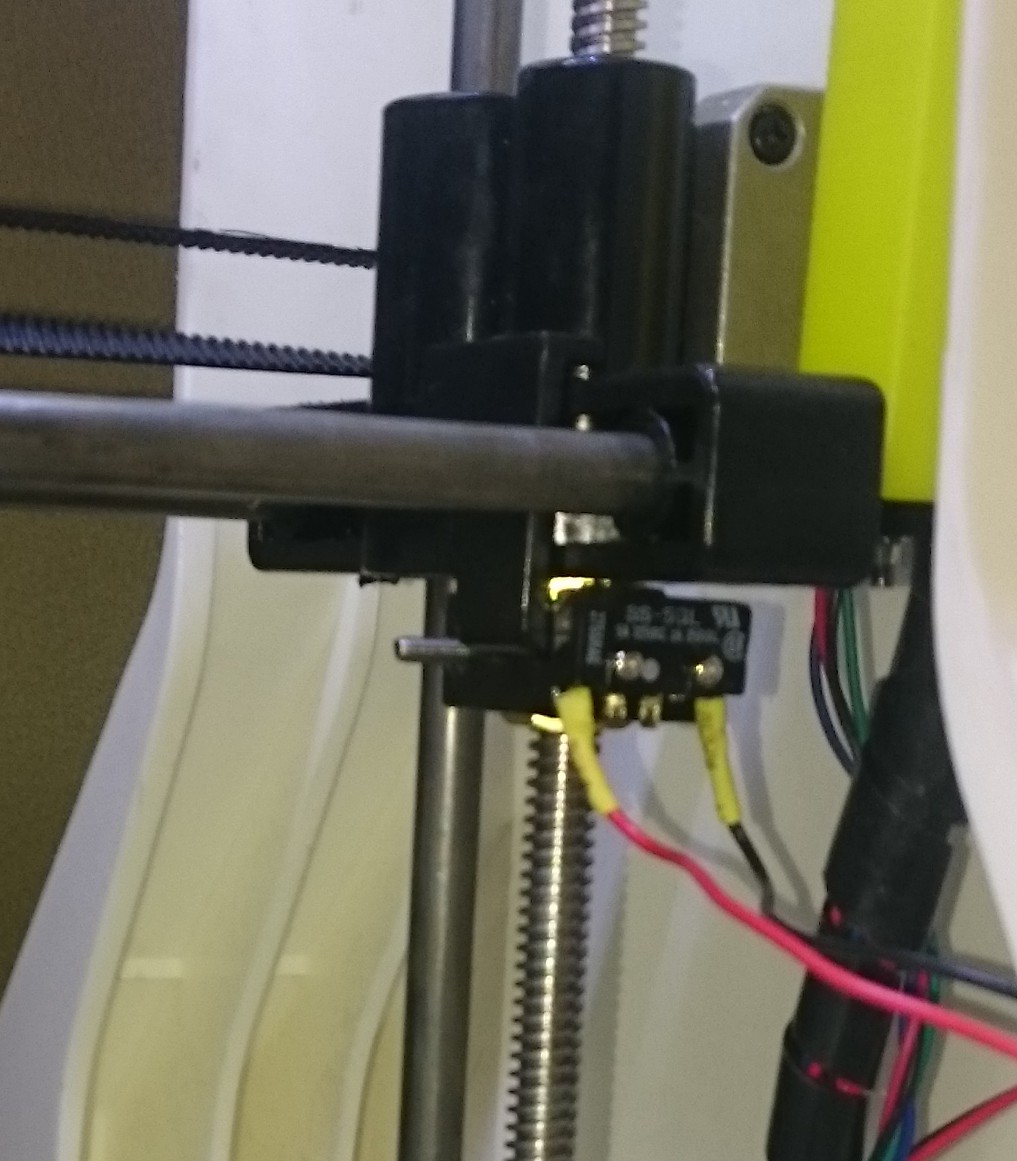
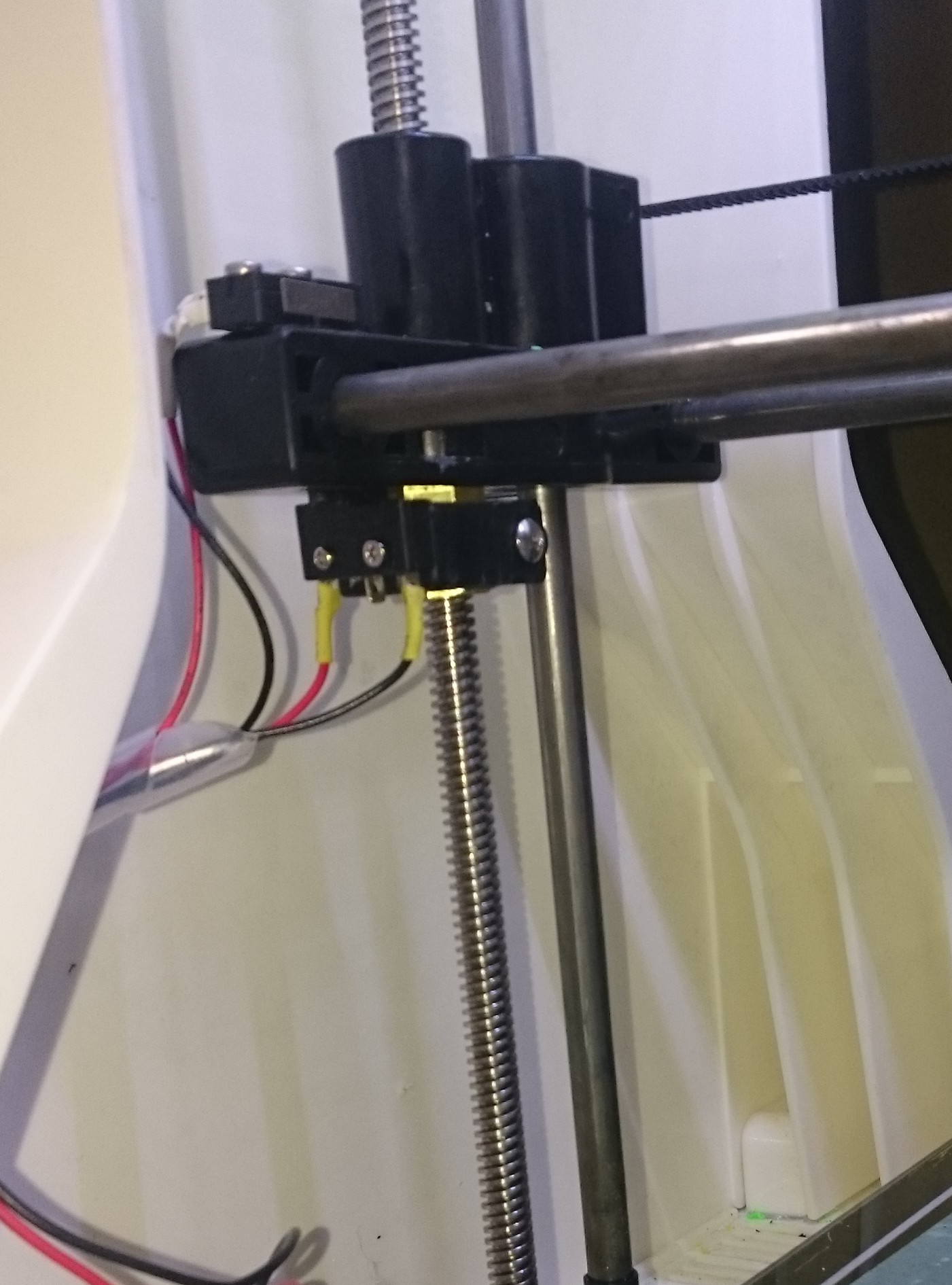
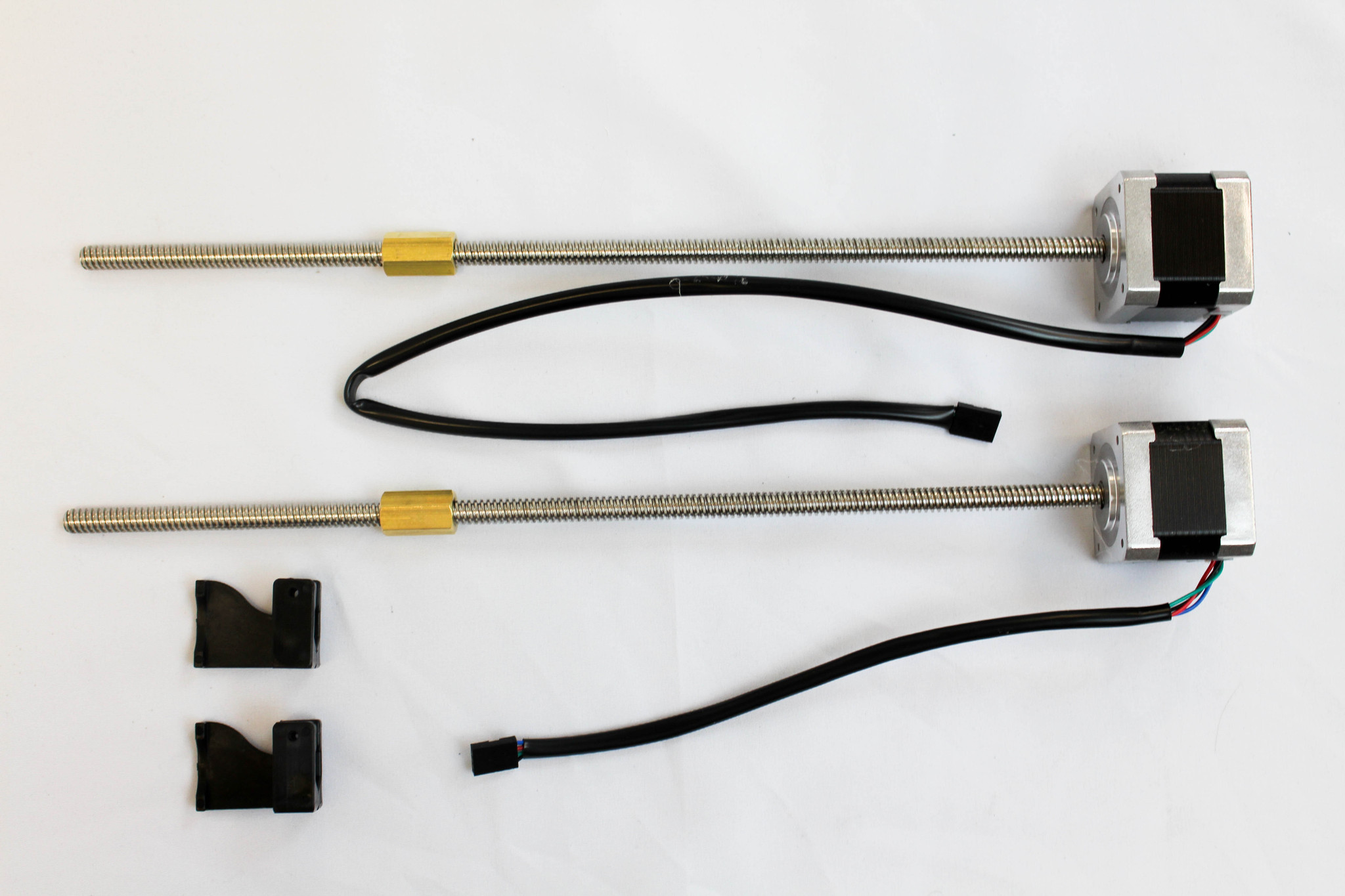
今回の修正では、Z軸のロッドが以下の写真のようなモーター一体型になりました。
また、カップリングナットがステージとセンサーの双方を上下に昇降させることになります。ヘッドがベッドに当たるとセンサーのみが下降することになりスイッチが入ることになります。

3Dプリンターの制御機構はATMEGA2560のArduinoが搭載されていて、これにReprap仕様のプリンター制御シールドが乗っています。Z軸のEndstp接点入力にこれら二つのセンサーがパラ付けで接続されます。どちらかの接点がメークすることで検知します。実際にステージの自重などでひずみも生じ左右での差異がでますので、この機構は正しいと思います。
3Dプリンターの制御はWin7ノートPCで実践してきましたが、Windows10への移行もありさらにUbuntuとの切り替えも含めて今日はUbuntu環境にもArduino開発環境とプリンタ制御ソフト(MatterControl)の双方をインストールしました。
3Dプリンターとの通信制御には250kbpsという速度設定が、当初は壁になっていましたが、この二年余りのLinux環境の進化で問題なく普通にインストールで動作するようになりました。次週には動作報告が出来るかと思います。
おまちください。













{kind=link}