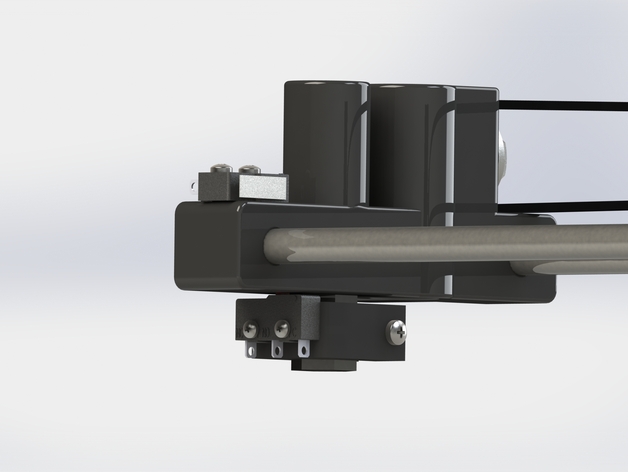
組み込みの里のRobo3Dプリンターは、KickStarterのバージョンです。そしてAutolevelの機能は無い。熱心なサポーターが開発したAutolevelの機構がthingverseに投稿されているので今回導入することにした。組み込み総合技術展で展示紹介されているYNCAの3DプリンターにAutolevelが搭載されていたことに起因するのだが、YNCAのそれは、ギミックもユニークなわかりやすいものなのだが、Robo3Dで紹介されているのは取り付ける位置も含めて大きく違っていた。Robo3Dのヘッドは下記の写真のようなものだが。ヘッド部分のステージが2本のX軸のレールにリニアボールベアリングで跨っている。
左側
右側
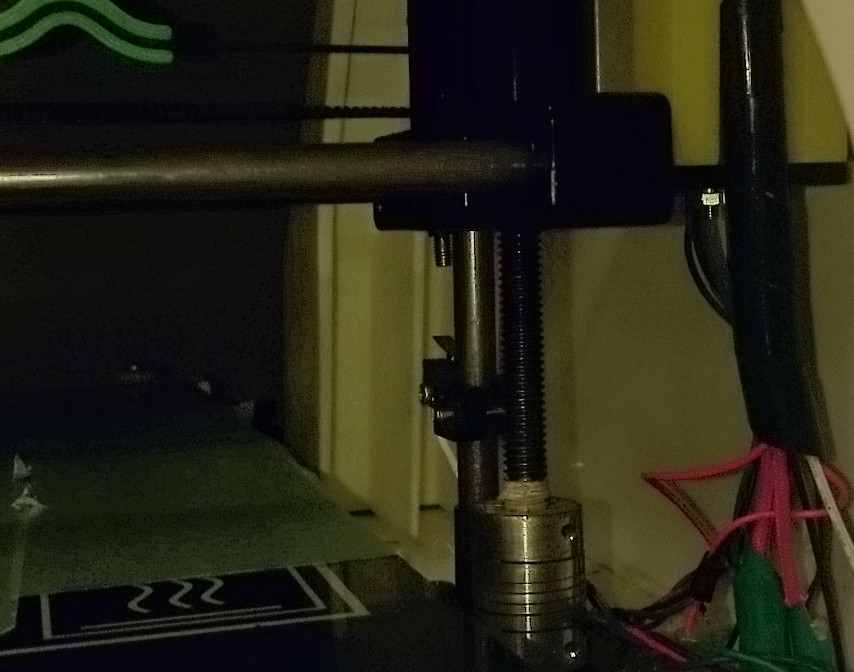
このX軸を支えているのは台は、Z軸のロッドとZ軸の長いボルトに取り付けられた六角ナットで支えられていて、ステッピングモータの回転でナットが上下するのに対してステージの自重で押さえつつ昇降するということになる。
この構造にシンプルなAutolevelメカニズムを装着するために以下の部品を取り付けることになる。長い六角ナット、PLAで作ったセンサ固定部品、センサとなるマイクロスイッチである。
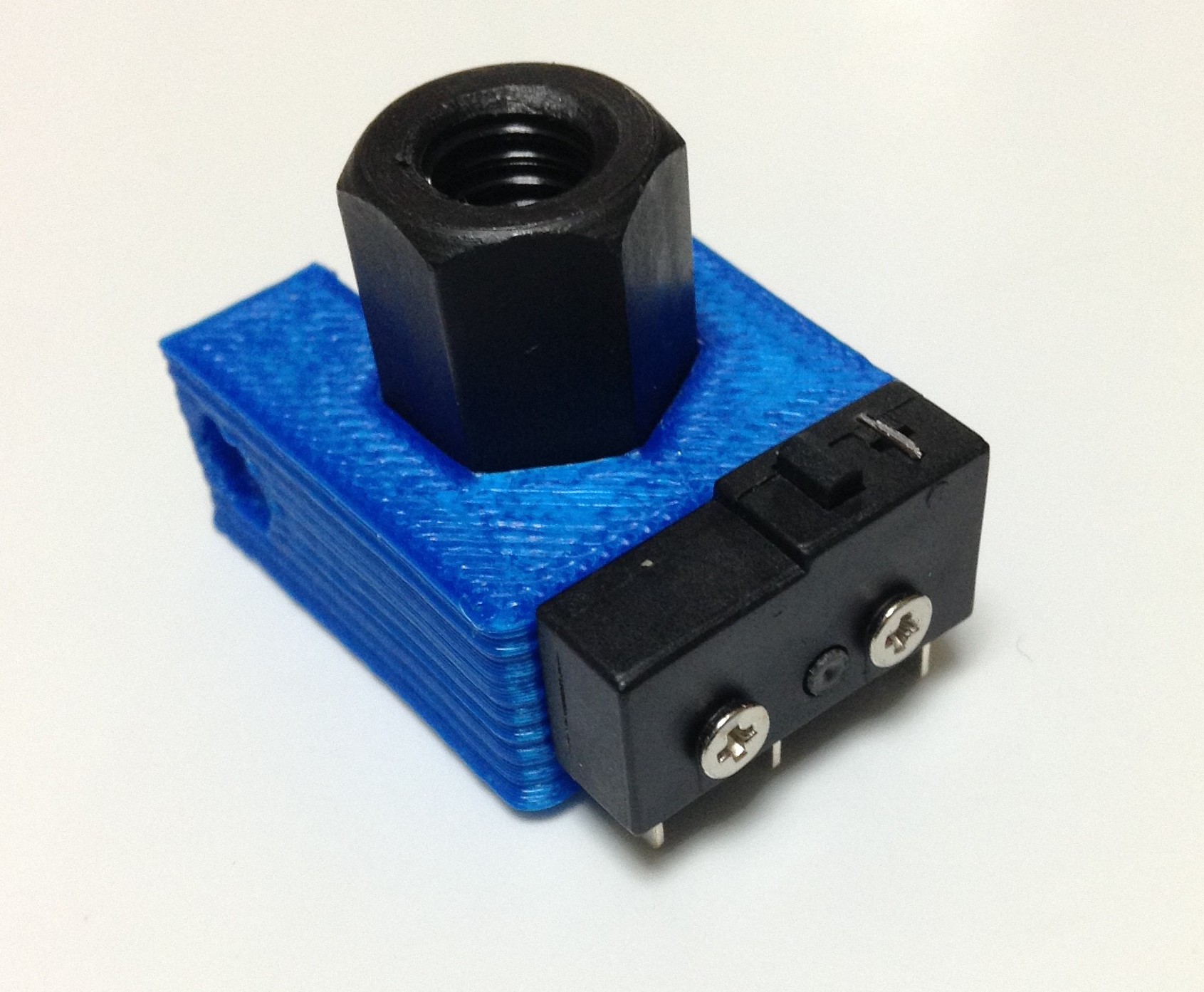
作者のサイトでは、以下の写真のようになると示されているが、六角ナットを長いものに変えている。ヘッドがテーブルにあたることで上部のテーブル支えの部分が止まり、今回追加するセンサ部分のみが下がり、そのことをマイクロスイッチで知ろうという構成だ。シンプルなものだ。