
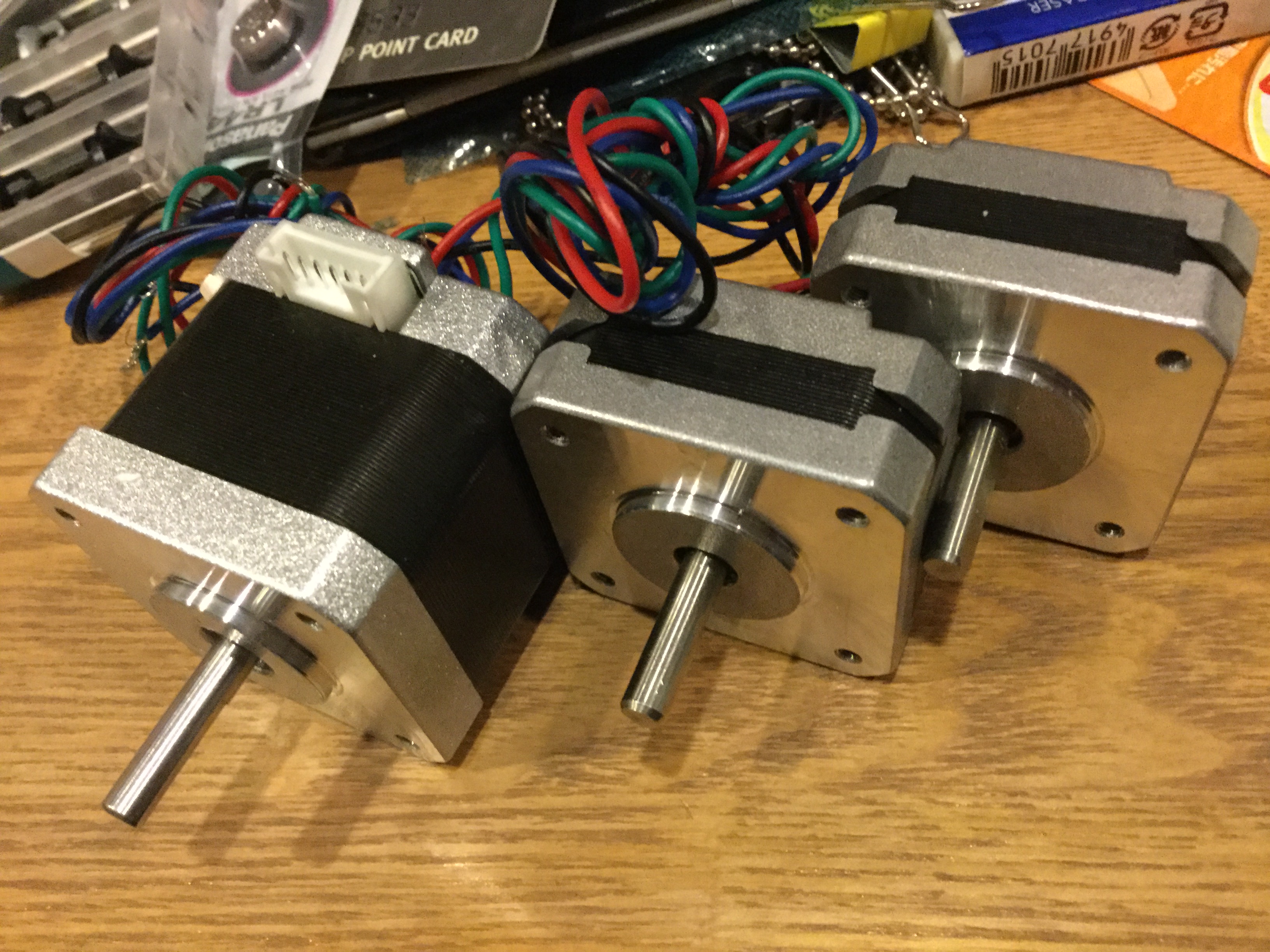
 今週の工房作業に間に合わなかった薄型モーター(NEAMA17 24mm)が届いた。従来品(NEMA17 40mm)と比較すると半分近い感じだ。
今週の工房作業に間に合わなかった薄型モーター(NEAMA17 24mm)が届いた。従来品(NEMA17 40mm)と比較すると半分近い感じだ。
ダイレクトドライブでフィラメント駆動をしている最近のモデルに比べればモーターのトルクは弱くとも3:1のギア比でトルクは十分なものになるし、もとよりExtruderブロックの重量が軽くなることで高速化などへの対応も期待できそうだ。こちらはRobo3Dのパワーアップの決め手になりそうだ。
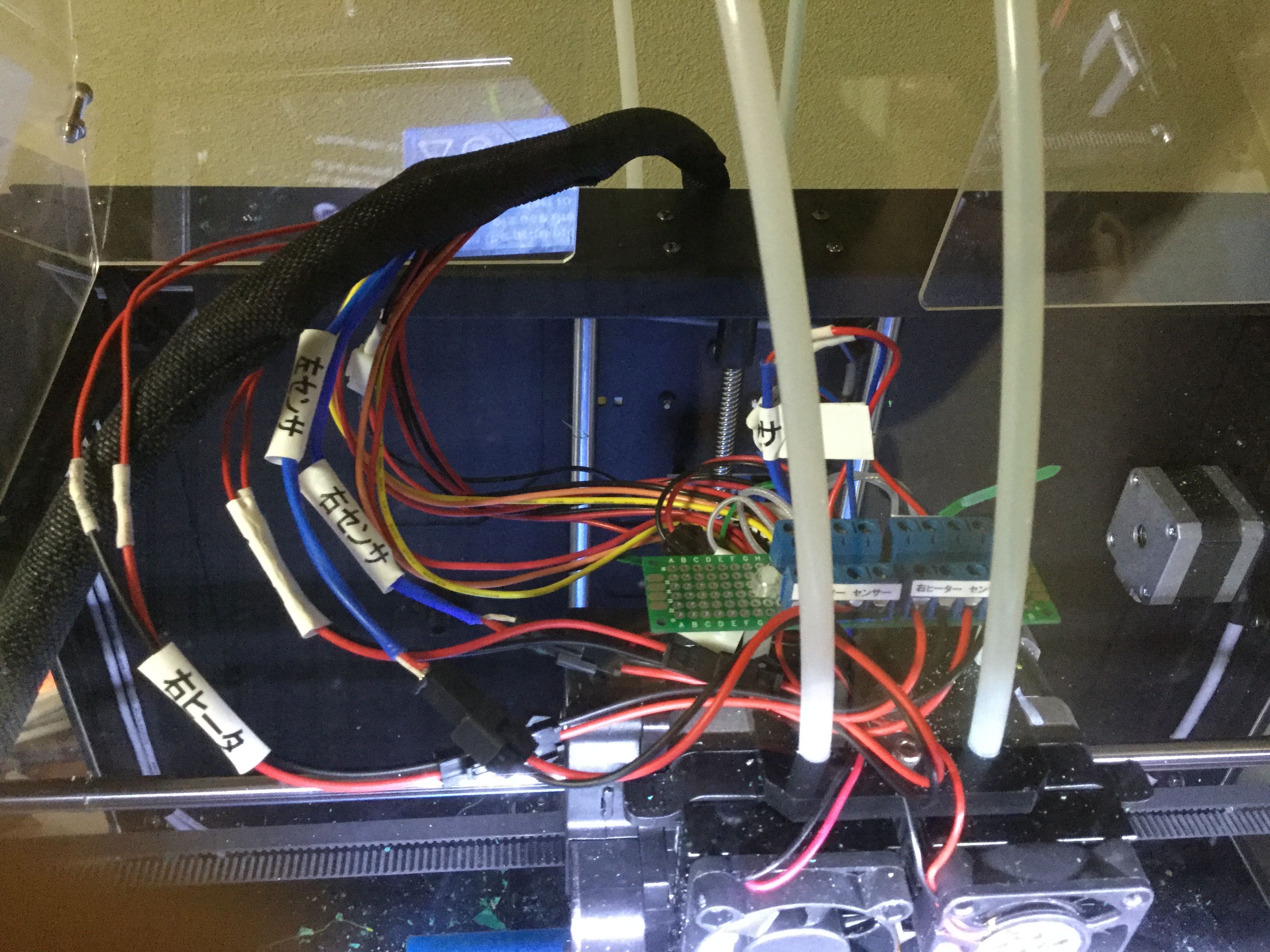 新型のReplicator2x互換モデルもエクスルーダーブロックでの配線がすべてターミナルサブ基板またはSMコネクターで接続されるようになりノズルの交換などの作業で大掛かりな配線全体を取り外すという作業が必要なくなり、進化した互換機モデル(FlashForge社のCreator Pro)と同等な保守状況になったといえる。
新型のReplicator2x互換モデルもエクスルーダーブロックでの配線がすべてターミナルサブ基板またはSMコネクターで接続されるようになりノズルの交換などの作業で大掛かりな配線全体を取り外すという作業が必要なくなり、進化した互換機モデル(FlashForge社のCreator Pro)と同等な保守状況になったといえる。
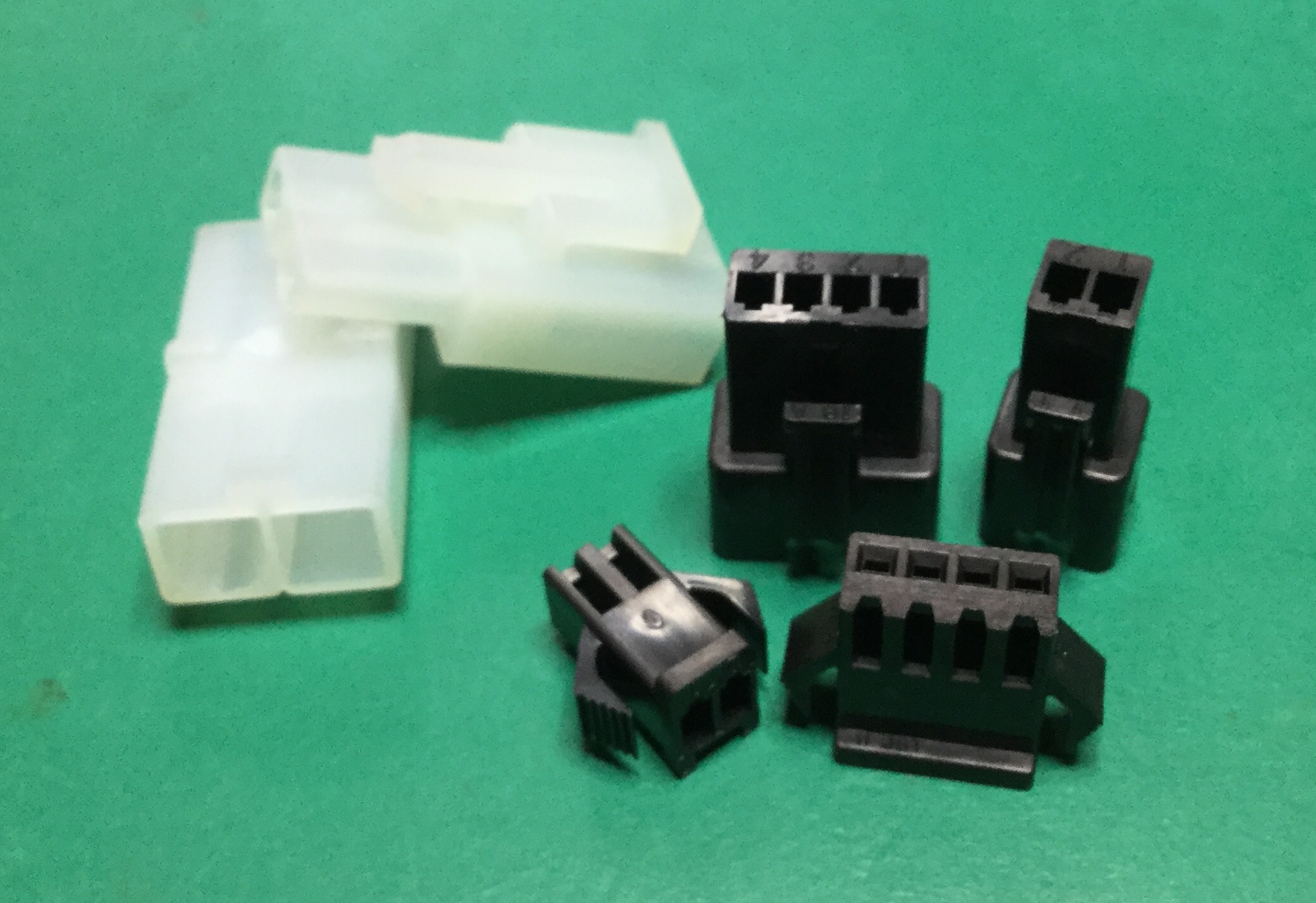 圧着タイプの中継コネクタでロック付きというSMシリーズを2/4pinを揃えたのでこれでモーターセンサーの配線は交換対応できるだろう。ヒーターブロックへの配線もとりあえずSMシリーズで適用しているのだが電流容量からするとLシリーズコネクタだと余裕がありそうだがエクストルーダー部分はかなりの移動を繰り返すので軽めのSMシリーズで様子をみることにしている。
圧着タイプの中継コネクタでロック付きというSMシリーズを2/4pinを揃えたのでこれでモーターセンサーの配線は交換対応できるだろう。ヒーターブロックへの配線もとりあえずSMシリーズで適用しているのだが電流容量からするとLシリーズコネクタだと余裕がありそうだがエクストルーダー部分はかなりの移動を繰り返すので軽めのSMシリーズで様子をみることにしている。
当初はPHシリーズの基板用のコネクタペアで代用していたのだが、温度センサーのワイヤーは半田性が悪く振動移動を繰り返すこのアプリケーションでは接触不良を引き起こす元凶となり、配線中継タイプのSMシリーズを用いることで解決をみた。
ちなみに、接触不良を起こすとフィラメント供給のための熱源制御が停止して3Dプリントが失敗することになり、LCDコンソールにはそうしたトラブルがレポートされて配線を確認するようにというエラーメッセージが出力されて、大きなボリュームの印刷途上で発生したりすることで、嫌気がさしてしまうことにもなる。
3Dプリンターの肝は、こうした振動や移動を繰り返すブロックについてセンサーでの温度計測フィードバックループが安定して構築できることが必要なので、安易に考えて保守性のみを考えると私が陥ったような失敗を繰り返すことになる。製品としての安定性を考えると丈夫な強度を持ったセンサーのワイヤーは十分な長さでプリンターの制御基板とエクストルーダーブロックを結ぶことが最も信頼度が高い配線構成としてとらえているのがオリジナルのMakerBot社での設計なのだろう。
気づくと、予備部品の蓄積で、そのまま3DプリンターやCNCが構成できるくらいの主要パーツのストックがある。
でも作るならば、DELTAプリンターかな。