
メカ組み立ては、完了しました。次回は、電気系統の作業で試運転にいきたいと思います。
オリジナルマインドのQt100です。
160*100位のサイズで、ミリングが出来ますよ。樹脂や金属に彫刻とか出来そうです。パネルの穴明とかも出来そうですね。

メカ組み立ては、完了しました。次回は、電気系統の作業で試運転にいきたいと思います。
オリジナルマインドのQt100です。
160*100位のサイズで、ミリングが出来ますよ。樹脂や金属に彫刻とか出来そうです。パネルの穴明とかも出来そうですね。
里で利用しているUbunutuマシンは、以前自宅で使用していたATOMが搭載されているShuttleのslim PC XS35だ。mini-PCIにWifiモジュールが搭載さているということだったが、うまく動作していなかったので有線LANで接続していた。RTLのWifiデバイスだったようで、課題があったようでBIOS更新で解決するらしいということで更新しようとしたのだがURLにあるようなダウンロードパスは既に更新されていて最新BIOSらしいものを取り入れることにした。
更新前のバージョンは1.08と立ち上げから確認できた。BIOS更新用に作成するのは最近ではUSBブートメディアだ。BIOS設定の画面からブート順序を確認して最初のブート対象としてUSBドライブが選択されていた。
USBブートメディア作成を実施して、ShuttleのサイトからのBIOS更新用のメディアをコピーして。マシンをリブートすると懐かしいWindows98のスプラッシュが表示され、武骨なDOSプロンプトが現れた。Shuttleからもらったデータに入っていたBATCHファイルでFLash書き換えを実施して更新した。書き換え確認をしようと、ブート中にDELキーを打鍵しても効かなかったが、立ち上がったUbuntuシステムは内蔵WLANを認識してくれました。
14.04LTS
XS35 Shuttle
文化祭で切れていた在庫を秋月ではなくて中華手配していましたが、ようやく入荷してきました。
CR2032の電池ホルダー @30
モータードライバーTA7291P @130

レーザーカッターのサーバーとして作ってもらっていたラズベリーパイでしたが、無線LANの認識がおかしいので別にシステムを作り練習がてら追いかけました。
システムはコンパクトな実装のArchlinuxのパッケージを使っていたらしいのですが、これは中々そのままではいかないようです。使った無線LANは、極安のプラネックスのUSBです。カーネルは、サポートしているようなのですが、軽量実装のリリースらしく色々とツールが足りません。
Pacmanが、このリリースでのモジュール取り込みツールなので、先ずは有線LAN環境でエラーメッセージなどから積み上げていきました。
無線LANの認識までは漕ぎつけましたので次回整理して報告します。
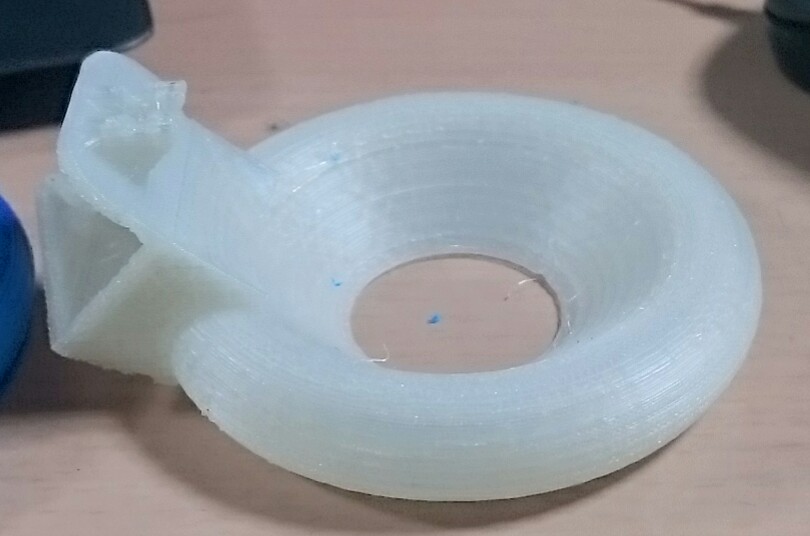
Robo3DのコントロールソフトがMatterControlに代わりきめ細かい設定が出来るようになりました。また、不明な設定がありPLAの出力時には問題となりそうでした。
設定によっては、こんな失敗をします。
失敗例
成功例
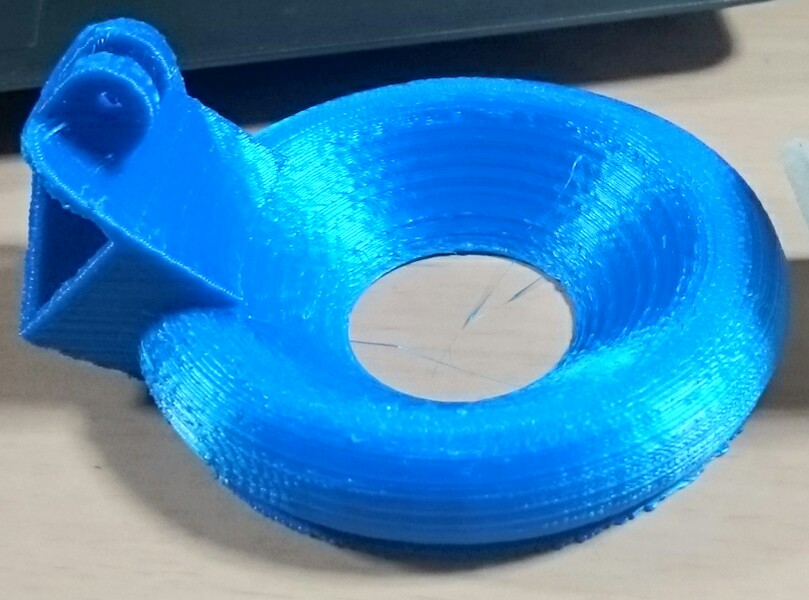
作品の頭頂部がとても小さくなった場合に、レイヤ毎に一休みしてしまう結果として冷えて出力がうまくつながらなくなります。PLAでの作例なので、ファンで冷却してしまうのでこの設定があるとまずいようです。とりあえず層間のミニマムタイマーを0secにすることで成功しましたが、それまでは2secとしていたので大きな部分はよいのですが、細い部分での出力で問題となるようです。
この機能はおそらくABSでの出力などで必要なのかもしれませんが、PLAでは不要と思われます。
失敗と対策の記録として記します。

ウェアラブルな機器や仕込み服などを作成するのに使えますね。
直径30mm、厚みは5mm未満です。
電池は工夫がいりますね。
価格は@400です。

縫い付けに使うのは、導電糸です。LilyPadには、半田付けではなくて大きなスルーホールが開けられていてここに縫い付けることで関連パーツとの間も同様につなげてセンサーや周辺部品とつなぐことで仕上げます。
むろん、半田付けして組みこんでも結構ですが・・・